Highly-dynamical weak signal GPS capturing method assisted by inertial navigation system
A weak signal, inertial navigation system technology, applied in the field of navigation, can solve the problems of long-term coherent accumulation of difficult signals, rapid capture of unfavorable signals, and attenuation of capture sensitivity, and achieve high-sensitivity capture, improved dynamic tolerance performance, and improved processing gain. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0111] The present invention will be further described in detail below in conjunction with the accompanying drawings.
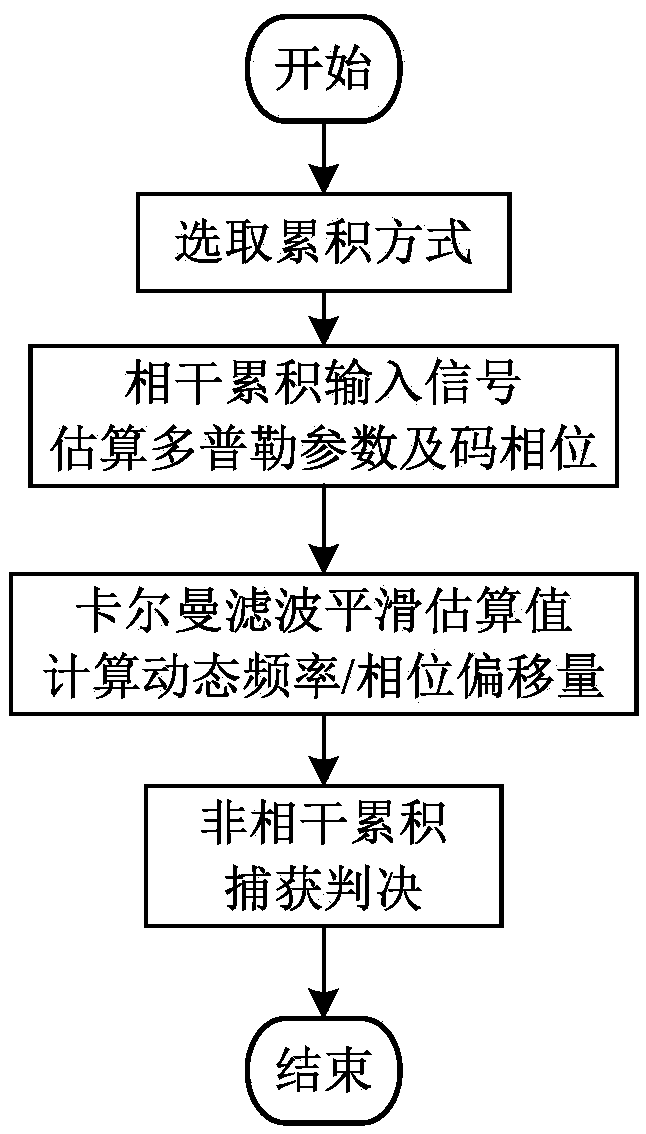
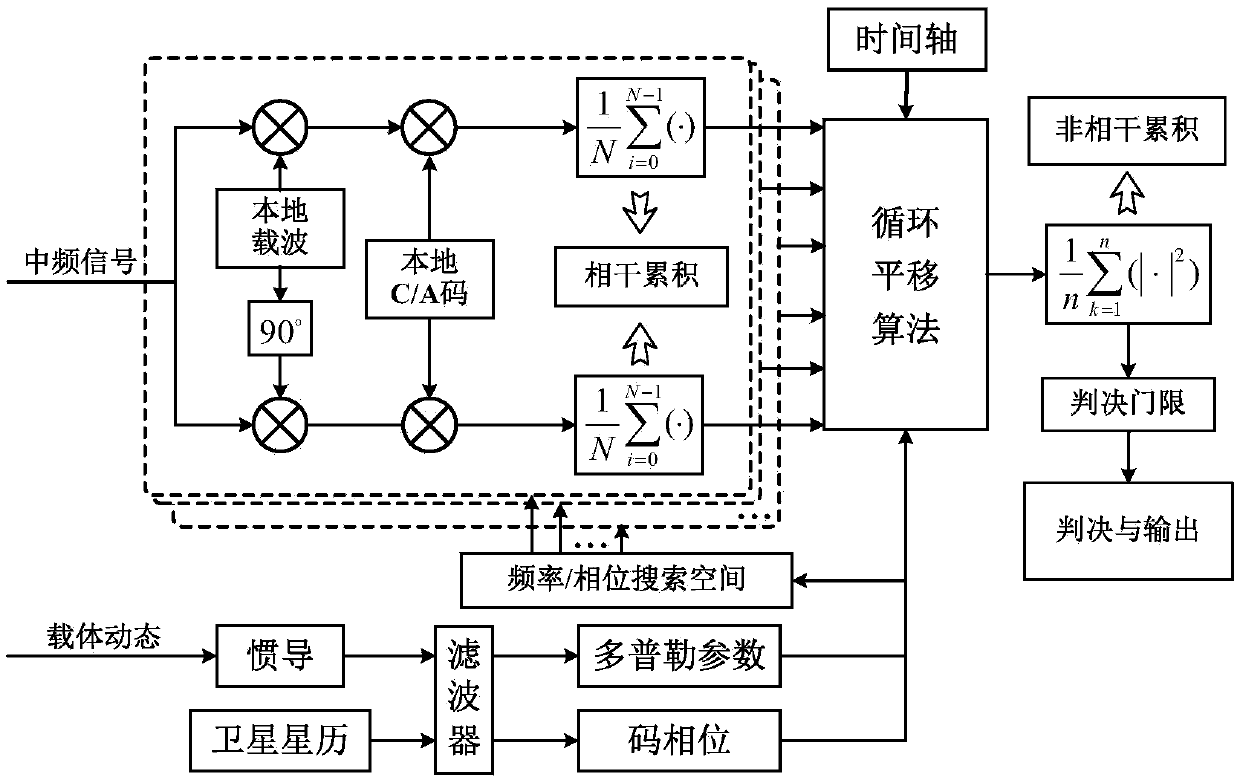
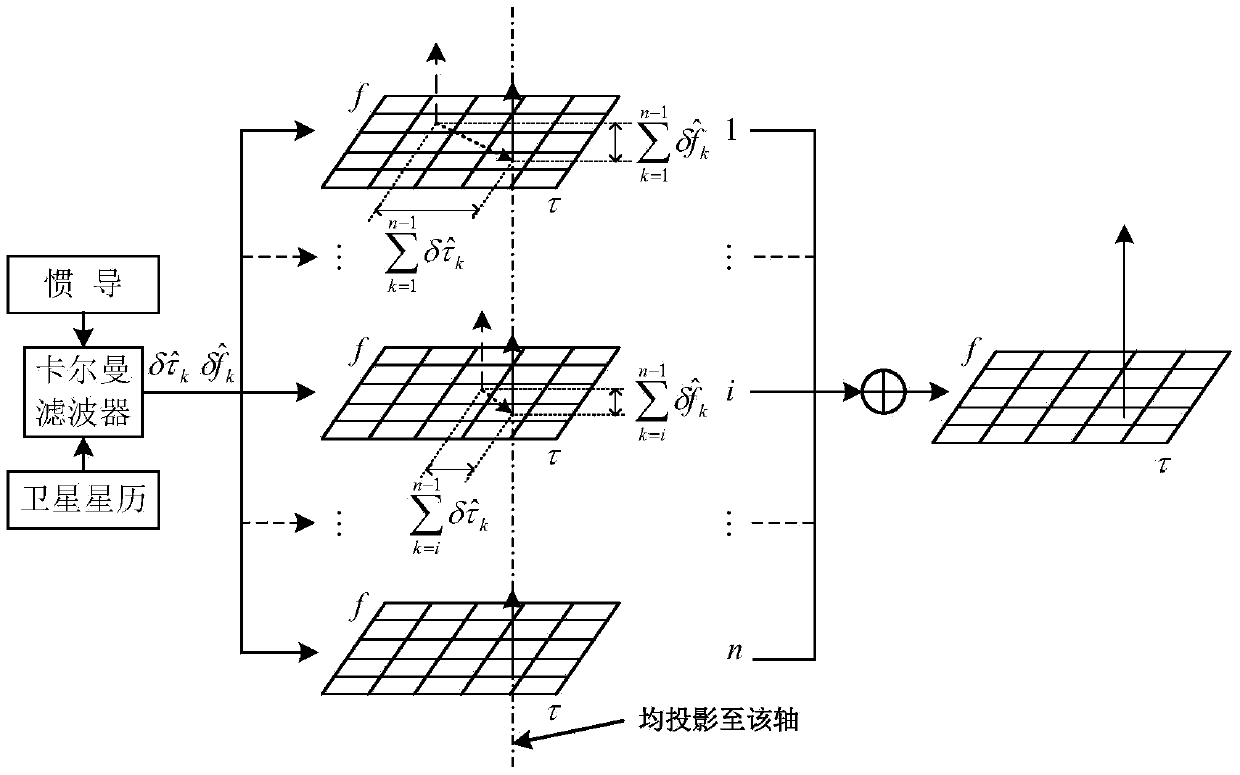
[0112] The invention proposes an inertial navigation system-assisted high dynamic weak signal GPS acquisition method. The coherent / non-coherent combined accumulation method is used to improve the carrier-to-noise ratio processing gain of weak signals in a high dynamic environment; at the same time, the Doppler parameters and code phase of the signal are estimated through the inertial navigation system and satellite ephemeris information to narrow the search space , improve the capture speed; use the filtering algorithm to smooth the Doppler parameters and code phase estimates And correct the frequency / phase dynamic offset between the local signal and the received signal through the cyclic frequency shift algorithm In order to enhance the dynamic performance and quick response ability of signal capture, so as to realize the high-sensitivity capture of GPS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More