

Bionic locust jumping robot with buffer performance
A robot and locust technology, applied in the field of robots, can solve the problems of limited jumping ability, insufficient landing buffer performance, jumping and buffering performance need to be further improved, etc., and achieve the effect of good motion track, good environmental adaptability and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
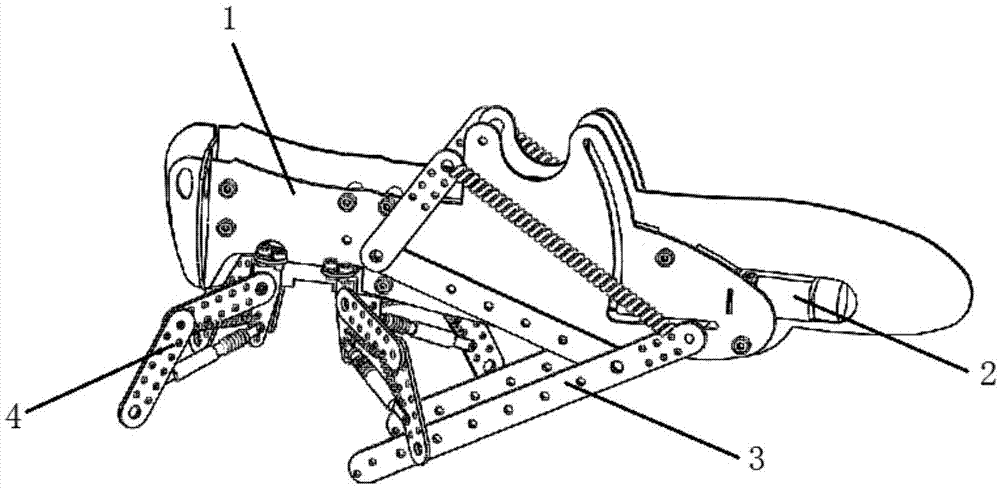
[0034] The present invention is a bionic locust jumping robot with cushioning performance, comprising four parts: a torso structure 1, a driving module 2, a jumping leg module 3 and a buffering leg module 4, as figure 1 shown.
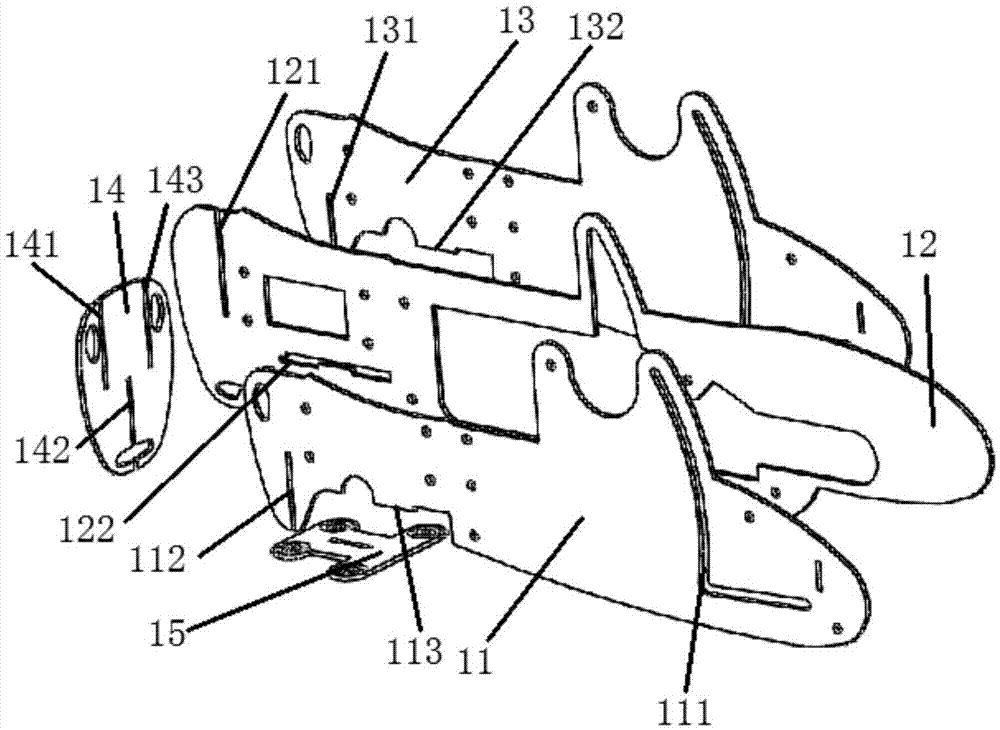
[0035] The trunk structure 1 of jumping robot is made up of the first trunk connecting plate 11, the second trunk connecting plate 12, the third trunk connecting plate 13, the head connecting plate 14 and the buffer leg connecting plate 15, as figure 2 shown. Wherein, the structure of the third torso connecting plate 13 is exactly the same as that of the first torso connecting plate 11 . The connection relationship between the first trunk connecting plate 11, the second trunk connecting plate 12, and the third trunk connecting plate 13 is: the first trunk connecting plate 11, the second trunk connecting plate 12, and the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More