Underwater acoustic two-way distance-measuring error compensation method applied in dynamic condition of multi-AUV coordinative navigation
A technology of dynamic conditions and ranging error, applied in the field of error compensation, can solve the problems of reducing the AUV update frequency, increasing the energy consumption of the underwater acoustic communication system, and affecting the ability of the AUV system to work with the cooperative positioning accuracy, so as to improve the underwater acoustics. The effect of two-way ranging accuracy and improving the effect of cooperative navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0027] (1) Purpose of the invention: The purpose of the present invention is to provide an error compensation algorithm for underwater acoustic two-way ranging, improve the accuracy of underwater acoustic two-way ranging under dynamic conditions, and then improve the collaborative navigation effect of multiple AUVs.
[0028] (2) Technical solution: In order to solve the above problems, the present invention provides an underwater acoustic two-way ranging error compensation algorithm under dynamic conditions, and the implementation process is as follows:
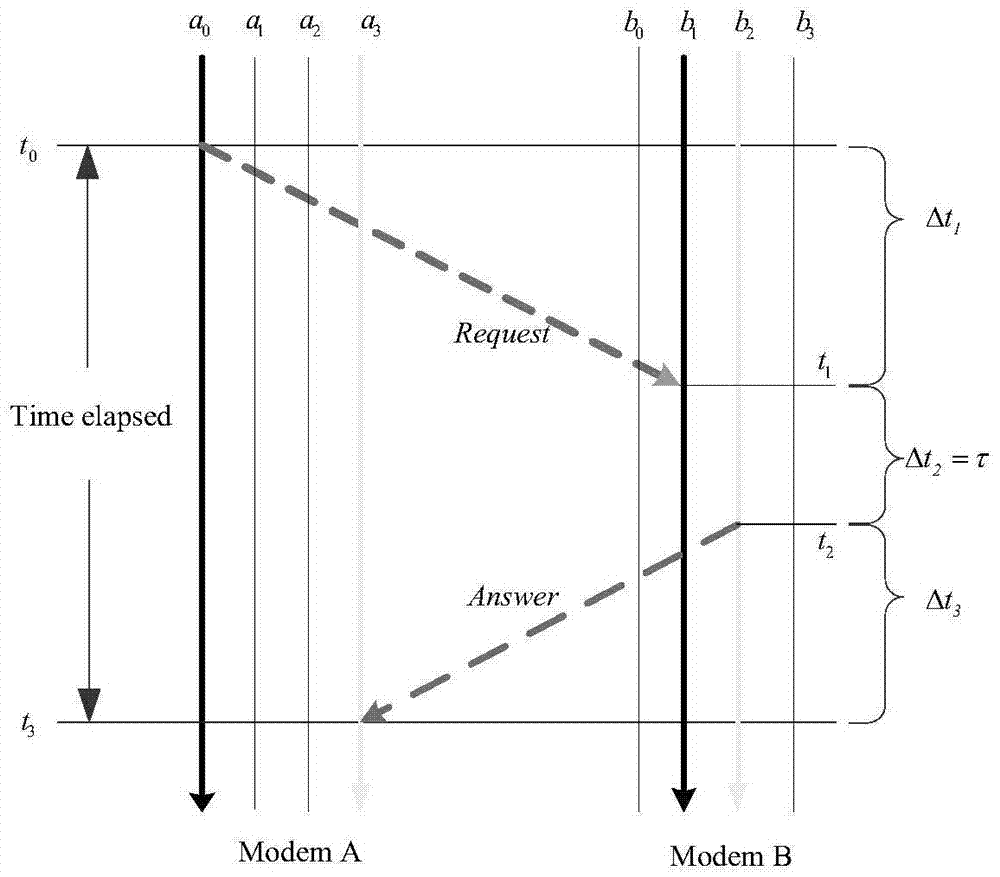
[0029] Step 1: The master AUV sends a ranging request command to the slave AUV;
[0030] Step 2: After the master AUV receives the ranging response signal from the slave AUV, calculate the distance between the master and slave AUV according to the round-trip propagation time of the underwater sound;
[0031...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More