

Six-axis robot self-adaptive deburring machining mechanism and control method thereof
A six-axis robot and processing mechanism technology, which is applied in the control of workpiece feed movement, metal processing equipment, manipulators, etc., can solve the problems of low deburring processing efficiency, inability to feed the tool in time, and processing posture deviation. , to achieve the effect of avoiding repeated tool setting, maximizing utilization and reducing replacement time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The six-axis robot adaptive deburring mechanism and its control method of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
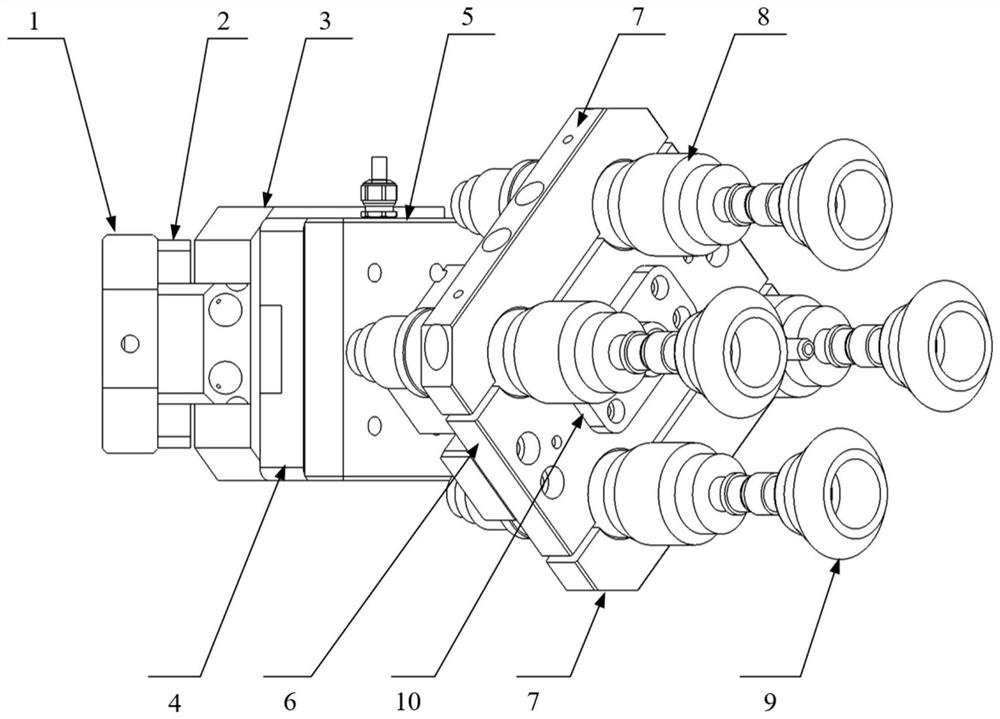
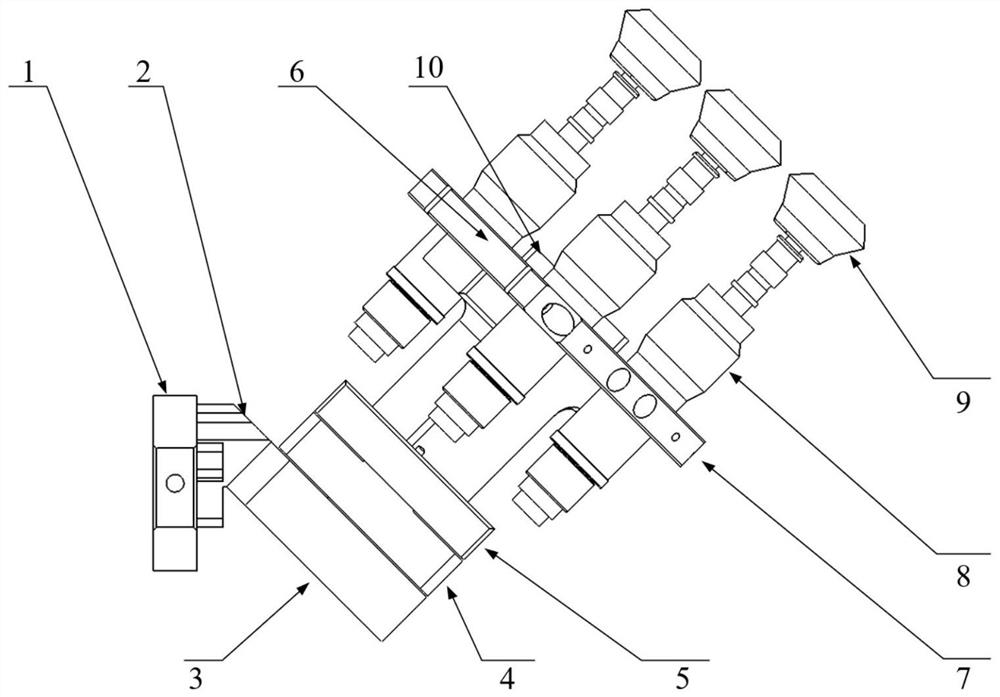
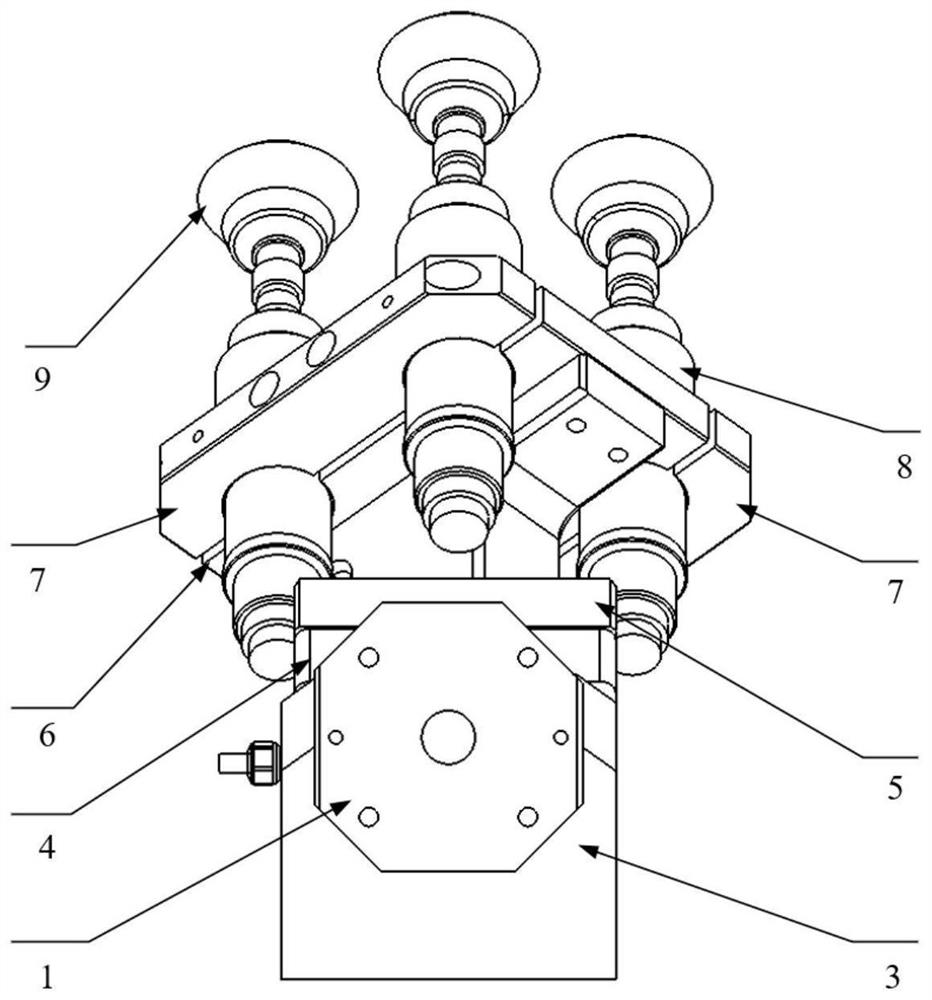
[0030] Such as Figures 1 to 4 As shown, a six-axis robot adaptive deburring processing mechanism includes a force sensor base 3, a three-dimensional force sensor 4, a sensor lintel 5 and a base plate 6, and a positioning standard rod is vertically fixed in the middle of the front side of the base plate 6 10 (when installing the brushes, provide a reference for the positioning of the four brushes to ensure that they are on the same working plane), a number of brush motor units 8 are evenly fixed on the base plate 6, and the front side of the brush motor units 8 passes through the joint Shaft device is connected with bowl type stainless steel wire brush 9. The three-dimensional force sensor 4 is fixed on the force sensor base 3 , the sensor bridge 5 is in the sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More