

Mobile robot homing control system
A mobile robot, control system technology, applied in control/regulation systems, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as extra cost, measurement angle error, expensive hardware support, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
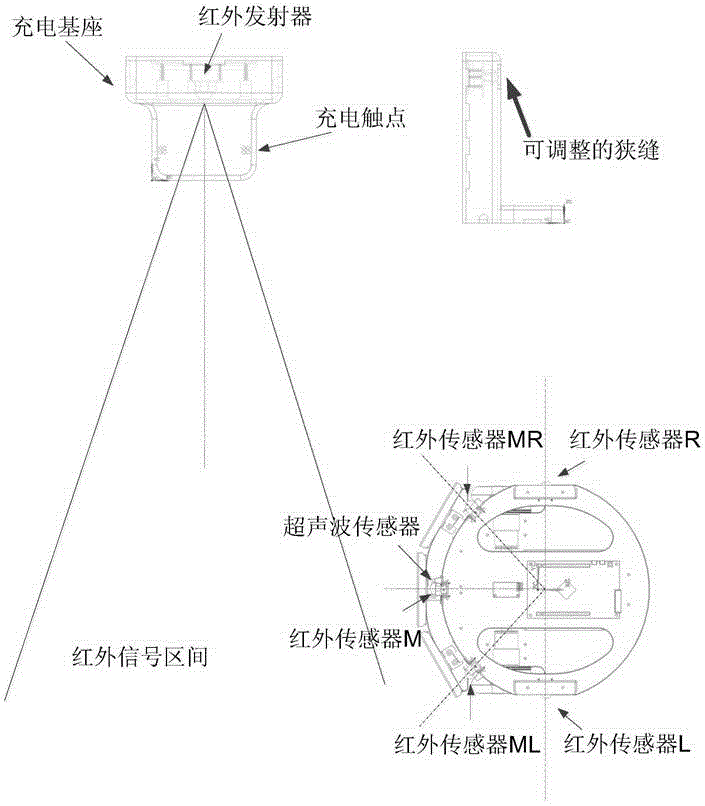
[0019] See figure 1 , the mobile robot homing control system provided by the embodiment of the present invention includes: an infrared transmitter, arranged inside the charging base, used to generate a fan-shaped infrared signal area; five infrared receivers, used to detect the infrared emission The signal emitted by the transmitter includes two infrared receivers located on both sides of the robot, and three infrared receivers located at the front of the robot; on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More