

Double-arm SCARA (selective compliance assembly robot arm) industrial robot
An industrial robot and dual-arm technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as increased assembly costs, unsuitable for large batches, high-precision assembly operations, and loss of operational accuracy, saving time and work High efficiency and high space utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings.
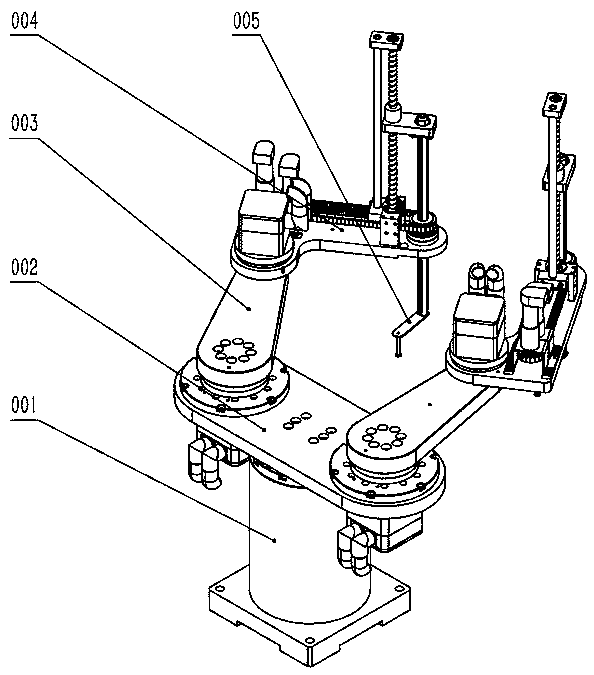
[0027] Such as Figure 1 to Figure 10 As shown, a dual-arm SCARA industrial robot includes a base assembly 001, a shoulder arm assembly 002, a large arm assembly 003, a small arm assembly 004, and an end effector assembly 005, and the shoulder arm assembly 002 is installed on the base assembly 001 , two boom assemblies 003 are installed at both ends of the shoulder-arm assembly 002, a forearm assembly 004 is installed at the end of the boom assembly 003, and an end effector assembly 005 is installed at the front end of the forearm assembly 004.
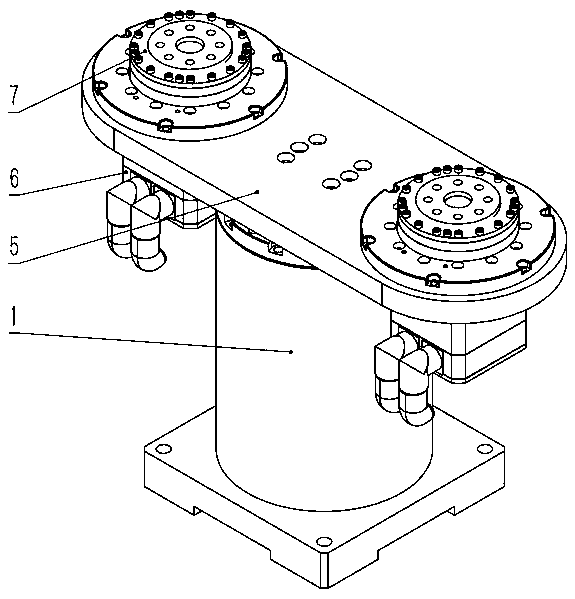
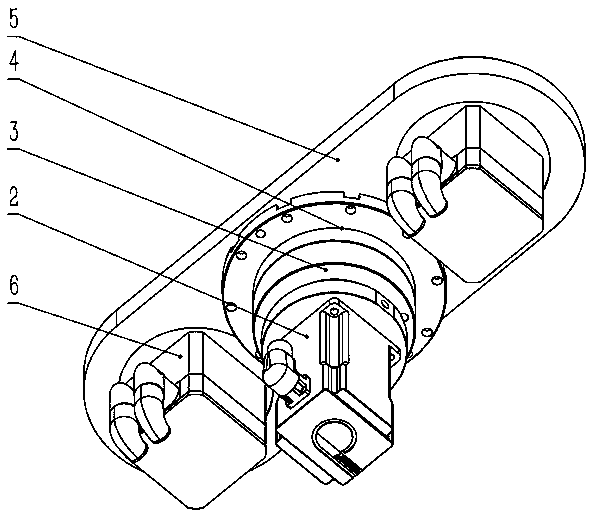
[0028] The base assembly 001 includes a base 1, a first motor 2, a first reducer 3, and a first mounting plate 4; the first motor 2 is connected to the first reducer 3 by screws, and the first reducer 3 is connected to the first reducer 3. The transmission shaft of the first motor 2 is connected by a flat key, the first speed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More