Mobile robot path planning method and system based on genetic ant colony algorithm
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A mobile robot, path planning technology, applied in navigation computing tools and other directions, can solve the blindness of ant colony algorithm and other problems
Inactive Publication Date: 2016-04-20
JIANGSU UNIV OF TECH
View PDF3 Cites 46 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] The purpose of the present invention is to provide a mobile robot path planning method and system to solve the technical problem of blindness in the initial stage of the ant colony algorithm
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
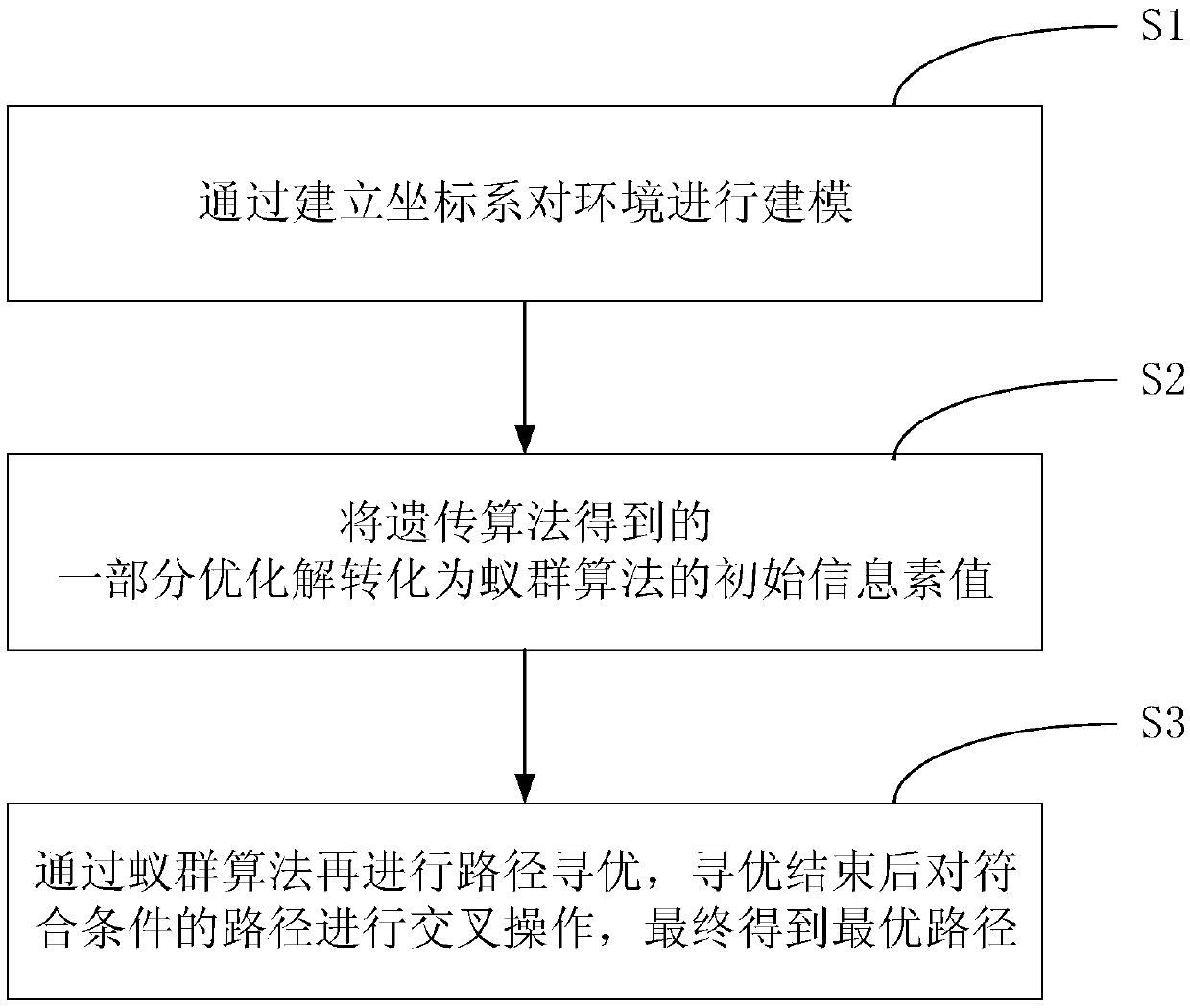
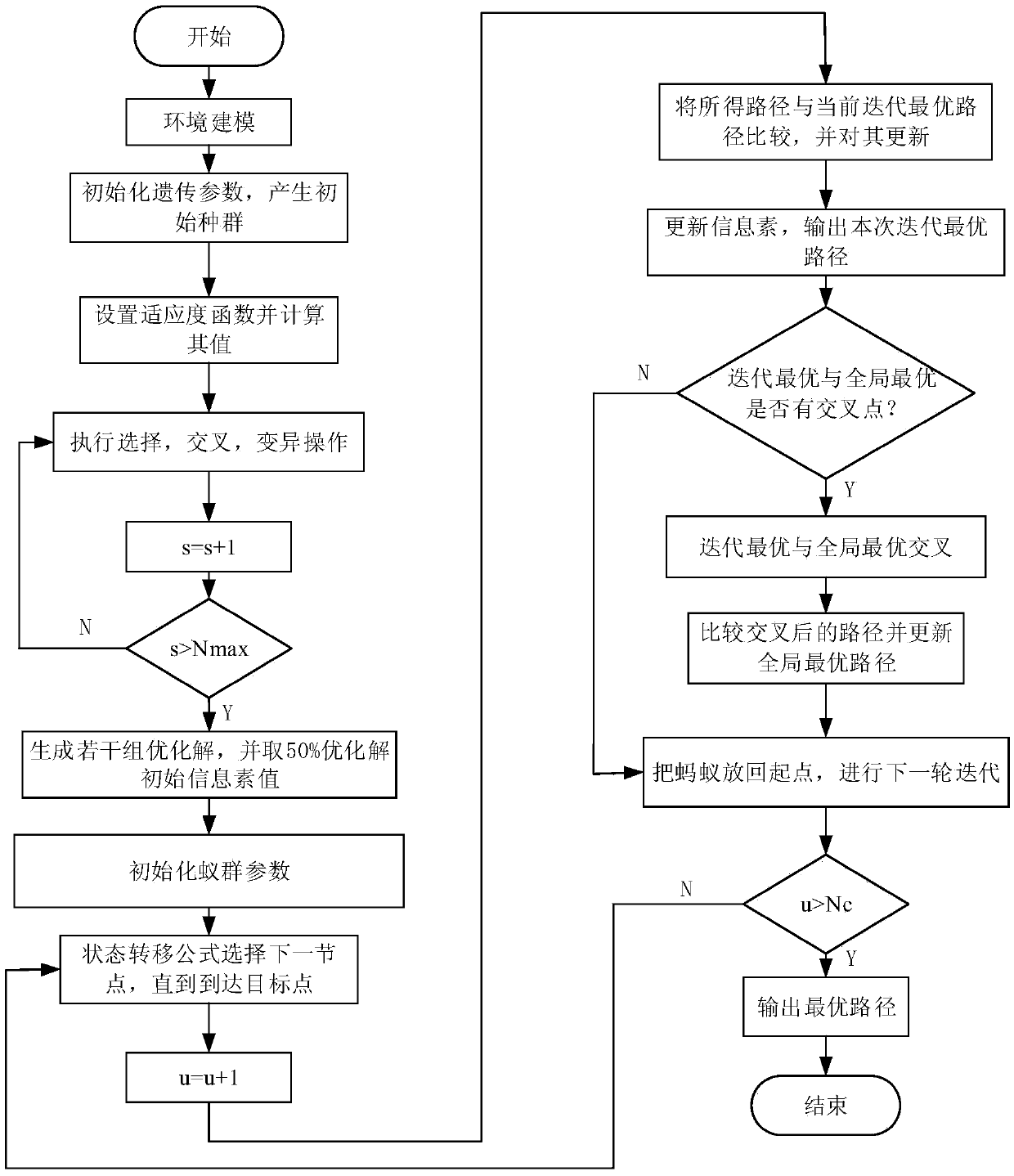
[0070] Such as figure 1 and figure 2 As shown, the present embodiment 1 provides a mobile robot path planning method, including the following steps:
[0071] Step S1, modeling the environment by establishing a coordinate system;
[0072] Step S2, converting a part of the optimized solution obtained by the genetic algorithm into the initial value of the pheromone of the ant colony algorithm;
[0073] In step S3, the path optimization is carried out through the ant colony algorithm, and after the optimization is completed, the crossover operation is performed on the qualified paths, and finally the optimal path is obtained.
[0074] As an optional implementation of environment modeling, the method for modeling the environment by establishing a coordinate system in step 1 includes: using the environment detection device that comes with the mobile robot to model the environment to generate a random initial path.
[0075] Specifically, the environment modeling is to take the s...
Embodiment 2
[0113] Such as figure 1 and figure 2 As shown, on the basis of embodiment 1, this embodiment 2 provides a mobile robot path planning system, including:
[0114] The environment modeling module is used to model the environment by establishing a coordinate system;
[0115] A pheromone obtaining module for obtaining an initial value of the pheromone of the ant colony algorithm, and
[0116] An optimal path acquisition module connected with the pheromone acquisition module.
[0117] Wherein, the environment modeling module generates a random initial path by using the environment detection device of the mobile robot to model the environment; the environment detection device includes: a camera, a sonar ring, and an infrared sensor of the mobile robot.
[0118] And, the pheromone obtaining module is suitable for converting a part of the optimized solution obtained by the genetic algorithm into the initial value of the pheromone of the ant colony algorithm; that is, initializing t...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a mobile robot path planning method and system based on a genetic ant colony algorithm. The mobile robot path planning method includes the steps that 1, modeling is conducted on the environment by establishing a coordinate system; 2, part of optimal solutions obtained through the genetic algorithm are converted to pheromones initial values of the ant colony algorithm; 3, optimum path search is conducted again through the ant colony algorithm, after optimum path search is ended, interlace operation is conducted on paths meeting the requirements of conditions, and the optimum path is finally obtained. The mobile robot path planning method and system overcome inevitable defects existing in a single ant colony algorithm, in other words, the ant colony algorithm is greater in blindness at the initial stage of search, the ant colony algorithm and the genetic algorithm are complementary in advantages, the search range of path search is shortened, and search efficiency of the optimum path is improved.
Description
technical field [0001] The invention relates to the technical field of robotintelligent algorithms, in particular to a method for path planning of a mobile robot based on a genetic ant colony algorithm. Background technique [0002] Mobile robots are an important field of intelligent control technology. In addition to being used in space exploration, ocean development, and atomic energy, they also have broad application prospects in factory automation, construction, mining, risk elimination, military, service, and agriculture. There are many methods of path planning, such as the steepest descent method, artificial potential field method, fuzzy reasoning method, etc. Using the steepest descent method converges slowly, is not efficient, and sometimes does not reach the optimal solution; using the artificial potential field method is convenient for real-time control, but lack of global information, there is a problem of local optimal value; the biggest advantage of using fuzzy...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More