

Real-time estimation method of road adhesion coefficient under braking working condition
A technology of road surface adhesion coefficient and braking conditions, which is applied in the field of automobile active safety control, can solve the problems of not considering load transfer, low calculation efficiency, and many design parameters, so as to eliminate the problem of chattering control, high calculation efficiency, The effect of fewer design parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
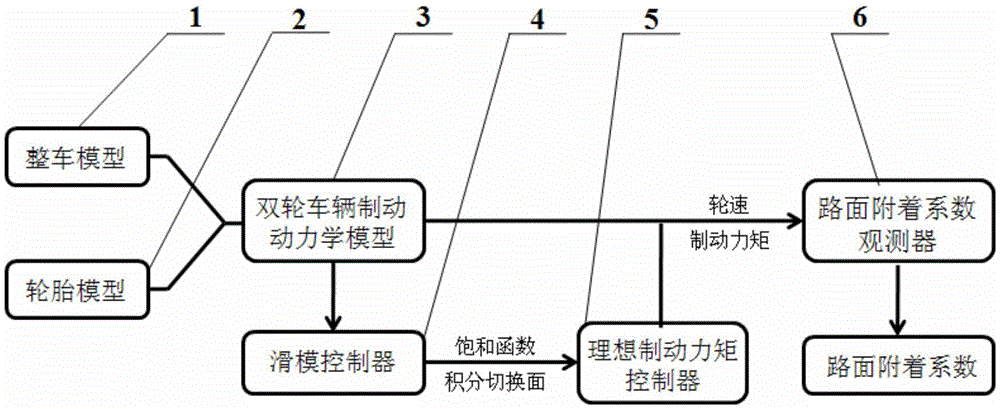
[0013] Such as figure 1 As shown, the present invention discloses a method for real-time estimation of road surface adhesion coefficient under braking conditions, including a two-wheeled vehicle braking dynamics model 3 , an ideal braking torque controller 5 and a road surface adhesion coefficient observer 6 . Among them, the two-wheeled vehicle braking dynamics model 3 is composed of the vehicle model 1 and the tire model 2.
[0014] Build vehicle model 1:
[0015] Suppose x is the displacement of the vehicle during driving, m f 、m r are the front and rear unsprung masses of the vehicle, h f 、h r are the heights of the front and rear unsprung masses of the vehicle, m s is the suspended mass, h s is the sprung mass height, F zf , F zr are the ground normal reaction forces on the front and rear wheels respectively, l f , l r are the dista...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More