Method and system for air fuel ratio control and detecting cylinder imbalance
A technology of air-fuel ratio and exhaust air-fuel ratio, which is applied in the direction of fuel injection control, electrical control, automatic control, etc., and can solve problems such as cylinder air/fuel imbalance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Hereinafter, a diagnosis method and a diagnosis system of an engine system will be described in more detail with reference to the accompanying drawings. Note that the embodiment described below is an illustrative example, and various alternative embodiments may also be used.
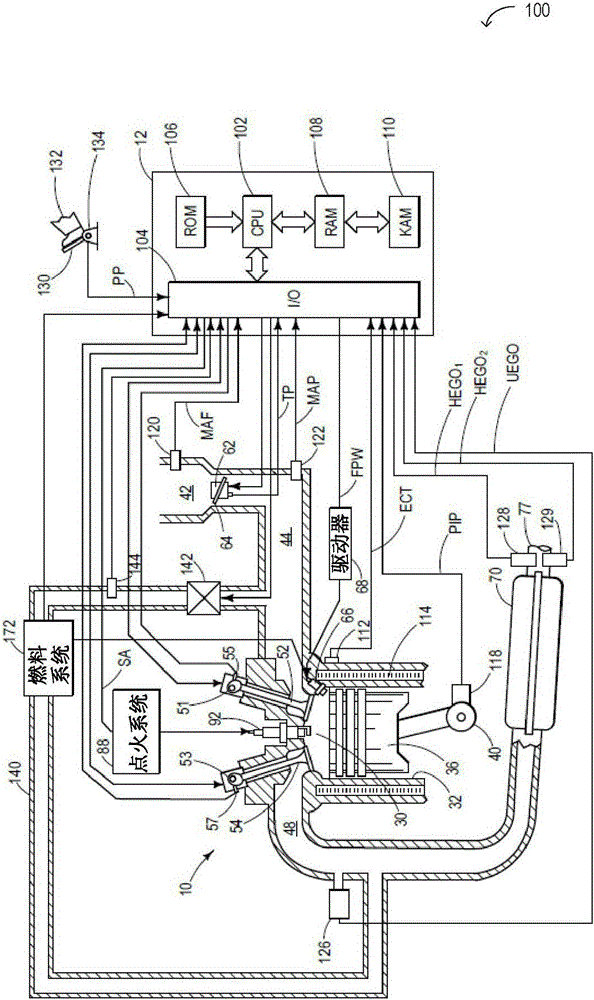
[0016] figure 1 The illustration shows a schematic diagram of an engine system 100 including one cylinder of a multi-cylinder engine 10 that may be included in a propulsion system of an automobile. Engine 10 may be controlled at least partially by a control system including controller 12 and by input from a vehicle operator 132 via an input device 130 . In this example, input device 130 includes an accelerator pedal and a pedal position sensor 134 for generating a proportional pedal position signal PP. Combustion chamber (ie, cylinder 30 ) of engine 10 may include combustion chamber walls 32 with piston 36 positioned therein. Piston 36 may be coupled to crankshaft 40 such that rotational motion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



