

Adaptive Kalman filtering algorithm applied to GPS navigation
An adaptive Kalman and GPS navigation technology, applied in the field of GPS navigation, can solve problems such as waste of resources, difficulty in applying the algorithm directly to the GPS tracking system, and reduce the performance of the tracker, so as to achieve the effect of accurate motion state.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
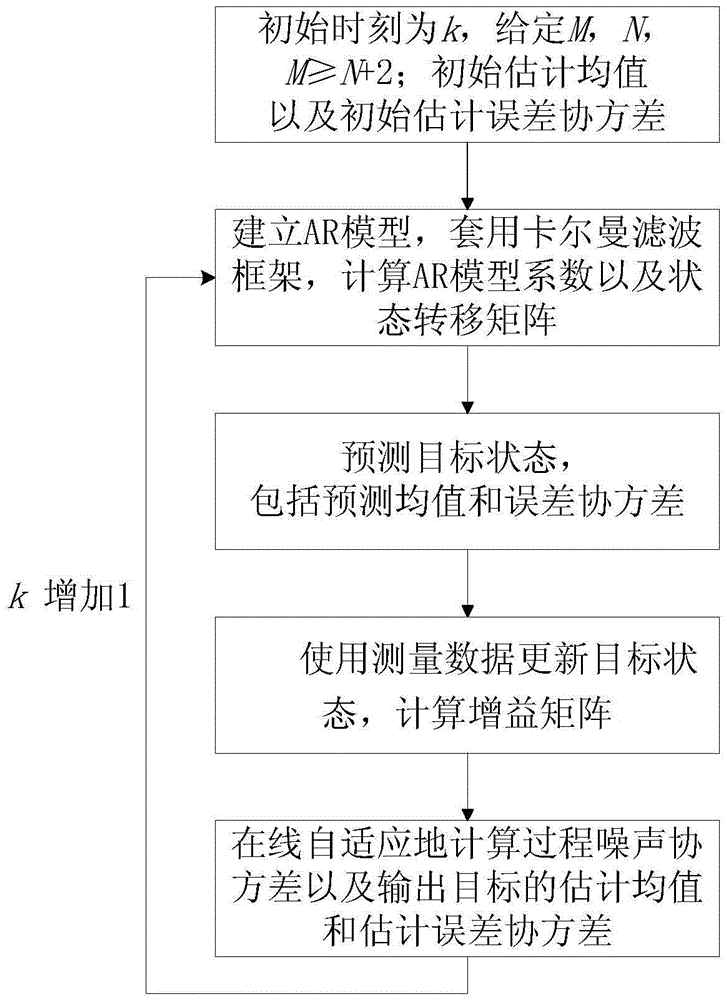
[0029] Such as figure 1 Shown, the present invention is a kind of adaptive Kalman filtering algorithm applied to GPS navigation, comprises the steps:
[0030] Step 1: Set the model parameters: the dimension M of the state variable, the order N of the polynomial, and satisfy M≥N+2, the initial matrix Q of the variance of the state noise 0 , and for the estimated mean x of the target state k-1|k-1 and covariance P k-1|k-1 Initialize, k represents the sampling point of discrete time; the initial state estimate x 0|0 =[z 0 z -1 …z -M+1 ] T , where z i (i=-M+1,-M+2,...,-1,0) are the target position observations at each moment before the filter starts;
[0031] Step 2 establishes the AR model, applies the Kalman filter framework, and calculates the AR model coefficients;
[0032] The specific implementation process of this step is as follows...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More