

Pneumatic material taking mechanical arm
A technology for retrieving manipulators and driving mechanisms, which is applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of complex displacement mechanisms, increased control difficulty, and high cost, and achieve the effect of simple overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present application will be further described in detail below in conjunction with the drawings and specific embodiments.
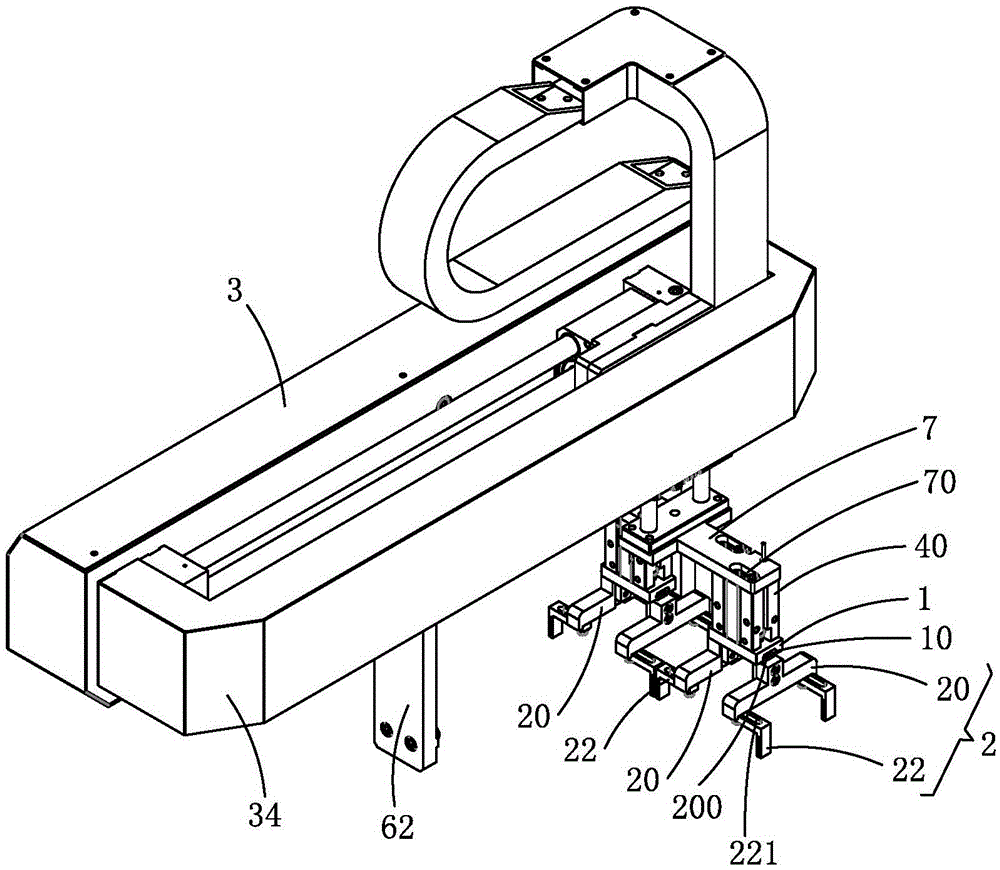
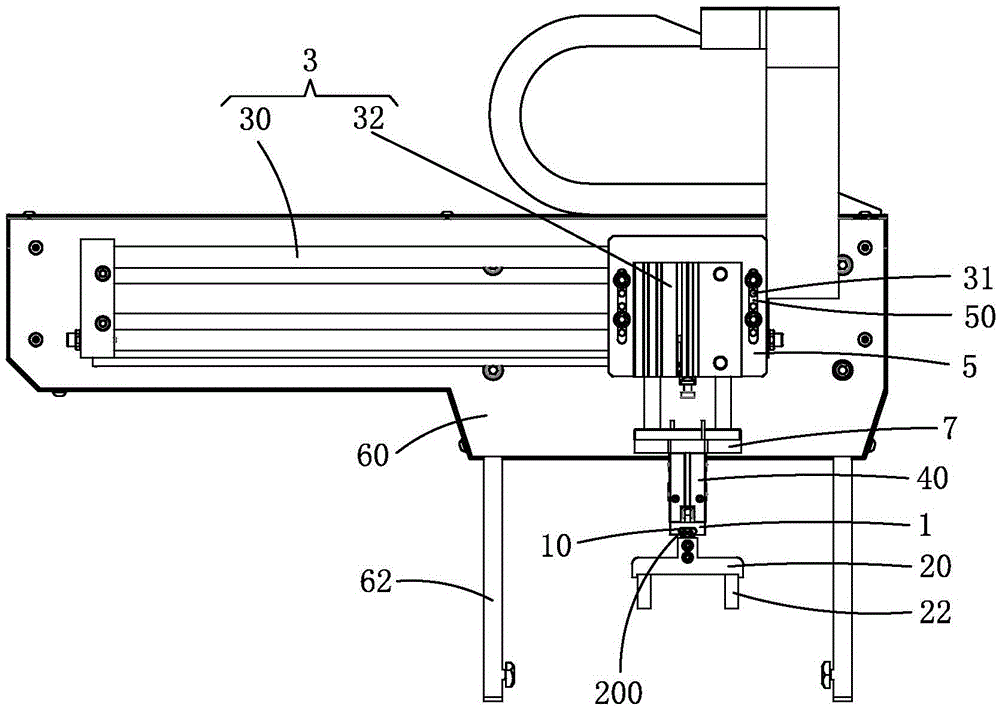
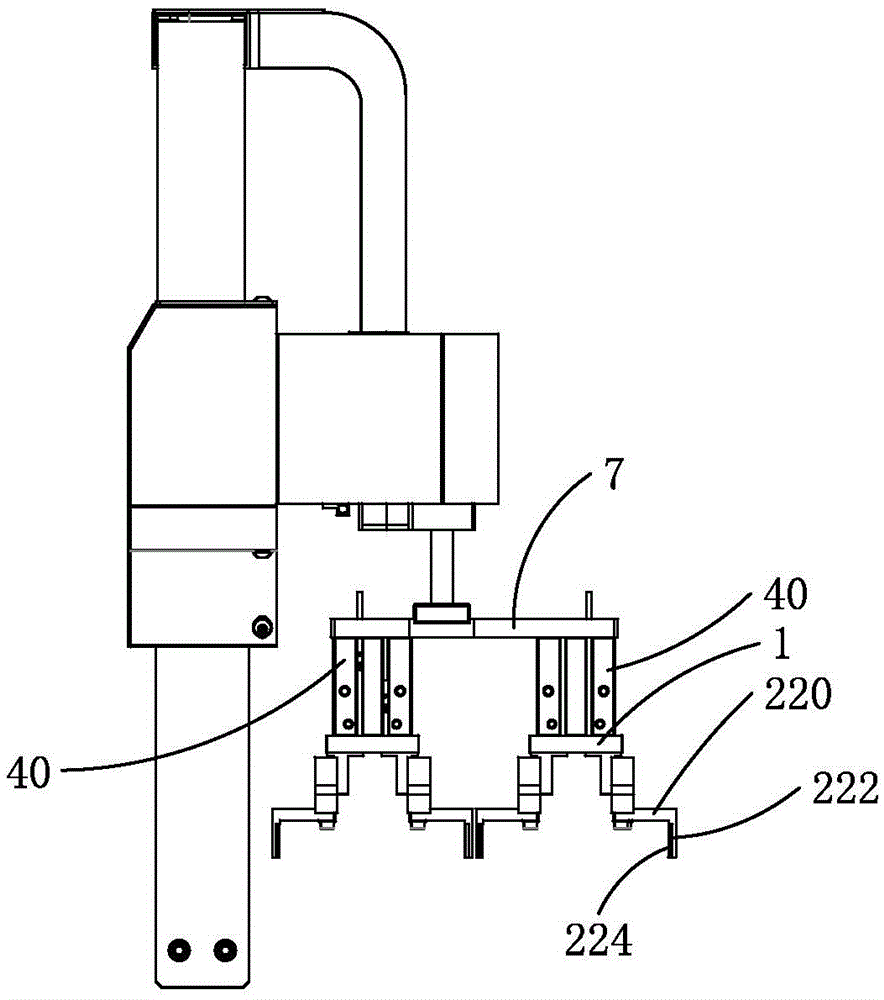
[0020] Such as Figure 1 to Figure 3 As shown, the present invention provides a pneumatic reclaiming manipulator, including a substrate 1, gripping fingers 2 movable in pairs on the substrate 1, a displacement mechanism 3 that drives the substrate 1 to move back and forth between different stations, and drives the same The clamping drive mechanism (not labeled) of the two clamping fingers of the pair.
[0021] The displacement mechanism 3 is mounted on a support plate 60 , and the support plate 60 is mounted on a corresponding support platform (not shown) by means of a support frame 62 . The displacement mechanism 3 includes a rodless cylinder assembly 30 installed on the support pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More