

Unmanned aerial vehicle control method and device based on computer vision
An unmanned aerial vehicle and computer vision technology, which is applied in the field of unmanned aerial vehicles, can solve problems such as disadvantageous users quickly learning and mastering the method of controlling the flying attitude of the aircraft, and achieves the effect of improving user experience and improving controllability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The preferred embodiments of the invention will be further described in detail below.
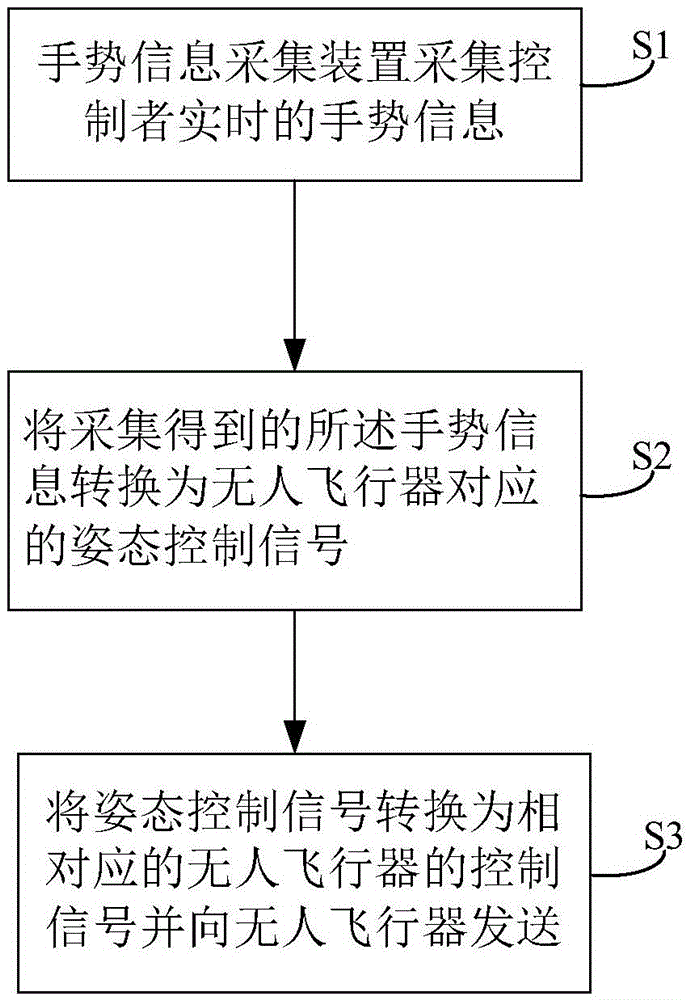
[0046] Such as figure 1 Shown, the unmanned aerial vehicle control method based on computer vision of a kind of embodiment, comprises the steps:
[0047] S1. The gesture information collection device collects real-time gesture information of the controller. Specifically, the gesture information collection device collects the depth information of the controller's gestures, and the obtained depth information can estimate the distance information between each calibration point of the controller's hand and the collection device. Gesture information can be calculated by using the positional relationship between the calibration points and the positional relationship between the depth information. This gesture recognition technology is an existing technology, such as the RealSense sensing camera developed by Intel.
[0048] The gesture information collection device may be a camera device...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More