

Distance measurement method and device based on binocular vision
A binocular vision and ranging method technology, applied in the field of visual ranging, can solve the problems of long processing time and cannot meet the needs of small UAVs for fast obstacle avoidance, and achieve the effect of ensuring calculation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
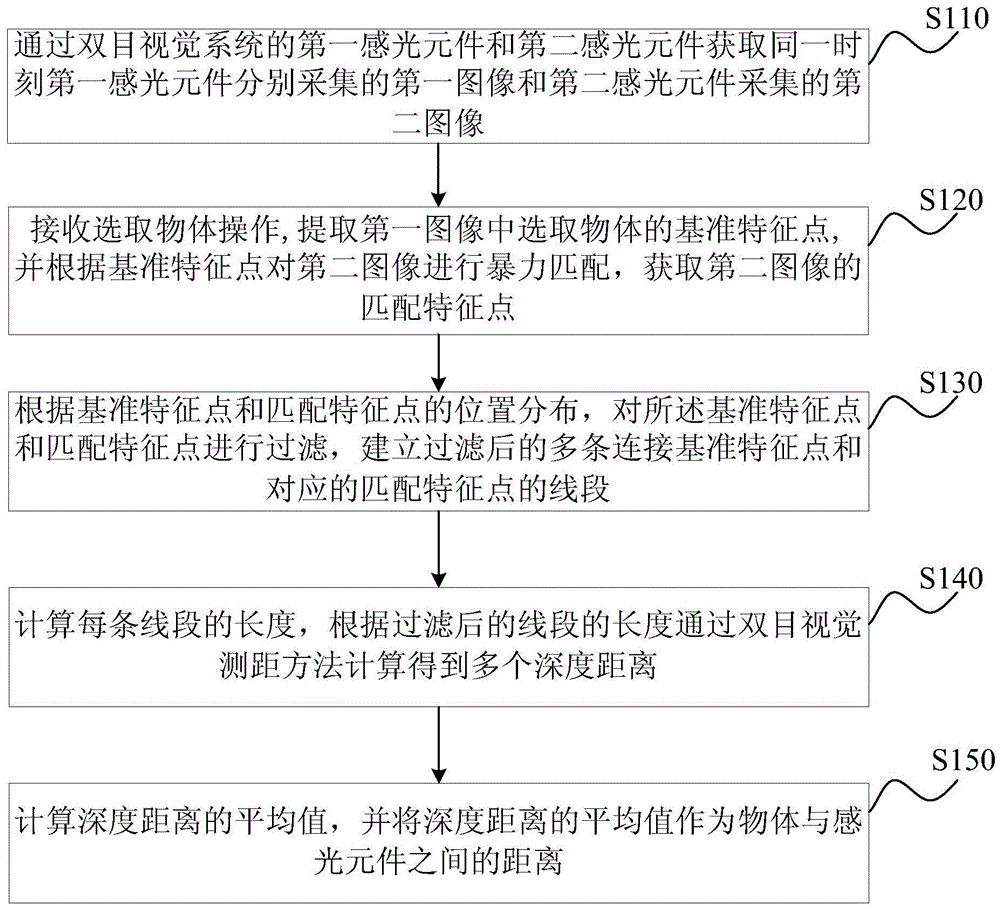
[0025] figure 1 It is a flow chart of the binocular vision-based ranging method provided in the first embodiment of the present invention. This embodiment can be applied to a small UAV to measure the distance between a small UAV and an object. The method can be based on binocular It can be implemented by a visual ranging device, which can be realized by software / hardware and integrated in a small UAV ranging device.
[0026] Described method specifically comprises as follows:
[0027] S110. Obtain the first image respectively collected by the first photosensitive element and the second image collected by the second photosensitive element at the same moment through the first photosensitive element and the second photosensitive element of the binocular vision system.
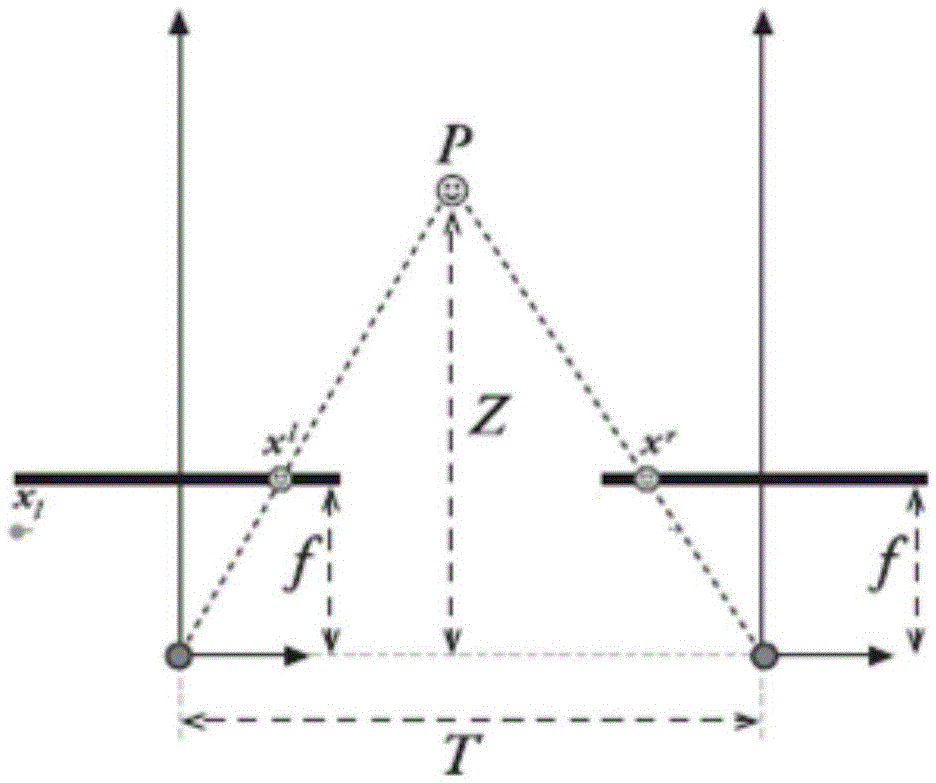
[0028] figure 2 It is a schematic diagram of the principle of binocular distance measurement in the distance measurement method based on binocular vision provided by the first embodiment of the present inventio...
Embodiment 2
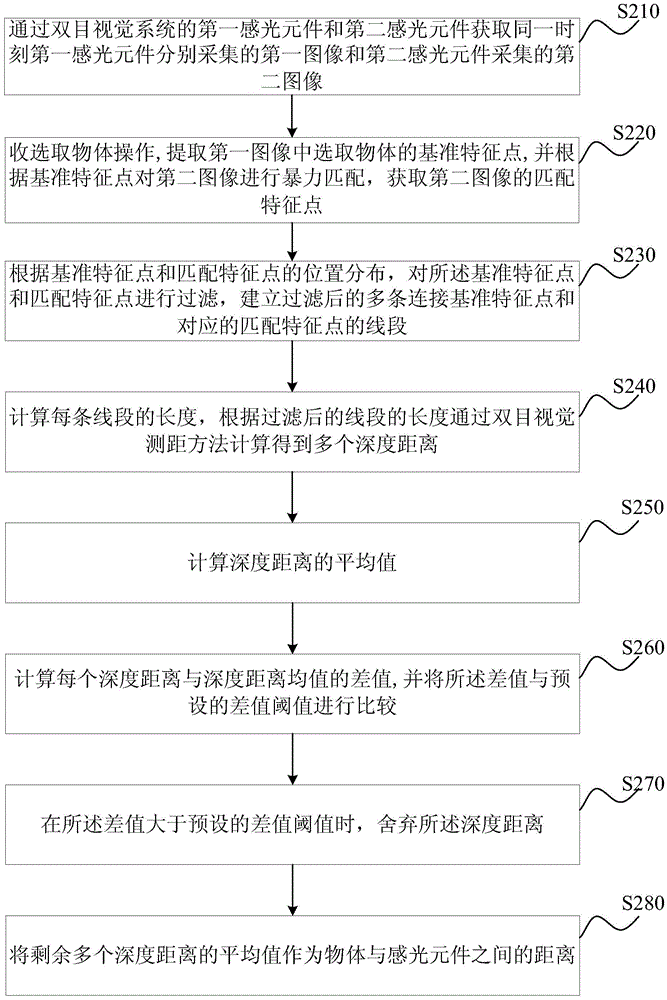
[0044] image 3 It is a schematic flowchart of a binocular vision-based ranging method provided in the second embodiment of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments. In this embodiment, after calculating the average value of the depth distance, the following steps are added: calculate the difference between each depth distance and the average value of the depth distance, and convert the difference Compared with the preset difference threshold, when the difference is greater than the preset difference threshold, the depth distance is discarded; and the average value of multiple depth distances is used as the distance between the object and the photosensitive element, specifically The optimization is: take the average value of the remaining multiple depth distances as the distance between the object and the photosensitive element.
[0045] Correspondingly, the method in this embodiment specifically includes:
[0046] S...
Embodiment 3
[0061] Figure 4 It is a schematic flowchart of a binocular vision-based ranging method provided by the third embodiment of the present invention. This embodiment is optimized on the basis of the above embodiments. In this embodiment, after the average value of the depth distance is calculated, the following steps are added before the average value of the depth distance is used as the distance between the object and the photosensitive element : respectively calculate the average value of the depth distance corresponding to each preset moment before and after the same moment; the average value of the depth distance is used as the distance between the object and the photosensitive element, and the specific optimization is: calculate the corresponding The average value of the average value of the depth distance is used as the distance between the object and the photosensitive element.
[0062] Correspondingly, the method in this embodiment specifically includes:
[0063] S310. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More