

Second-order nonlinear system no-model control method based on instruction filtering Backstepping
A second-order nonlinear and control method technology, applied in the field of model-free control of second-order nonlinear systems, can solve problems such as saturation control expansion difference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
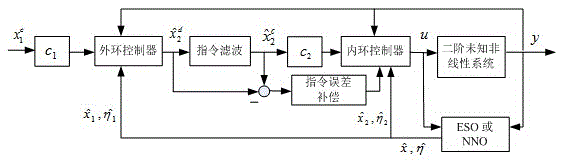
[0093] The invention provides a model-free control method for a second-order nonlinear system based on command filtering Backstepping. The invention combines ESO and NNO to realize the estimation of the unknown model and external disturbance of the second-order nonlinear system, and unifies the forms of the two, based on the two The unified form of the controller is designed to design the corresponding command filter Backstepping controller.
[0094] Model identification and state estimation of the present invention:
[0095] Consider the following unknown second-order nonlinear system:
[0096] x · 1 = x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More