

Underwater measuring method based on vision
An underwater measurement and vision technology, applied in the direction of measuring devices, instruments, camera devices, etc., can solve the problems of heavy weight, affecting the measurement accuracy of the system, divergence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
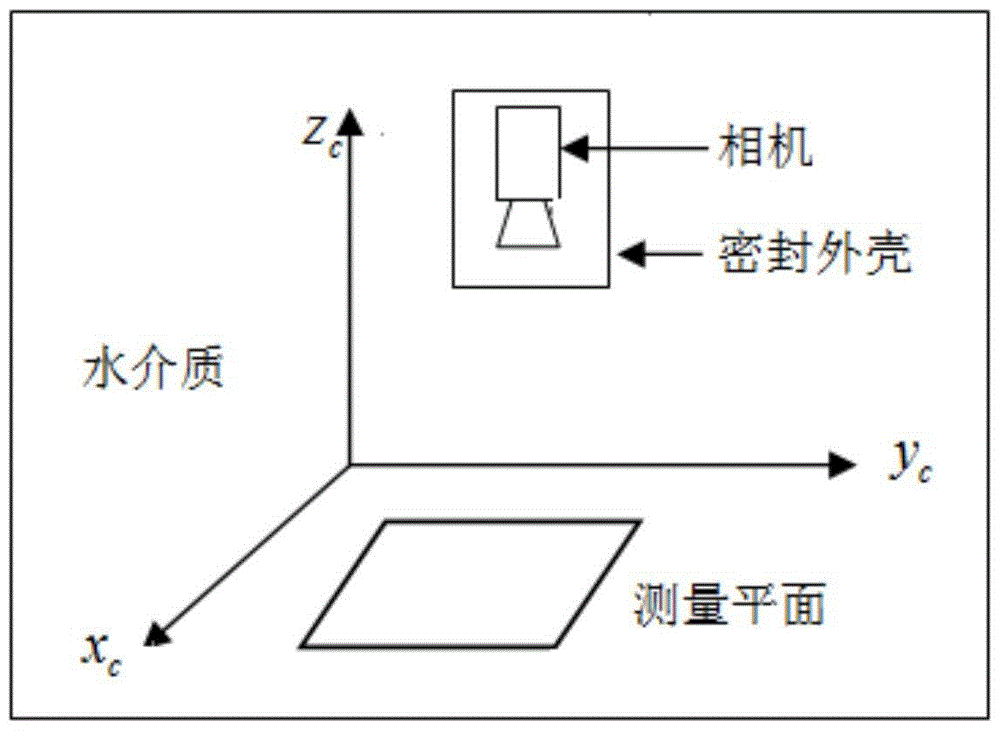
[0053] Embodiment 1. Underwater two-dimensional measurement method
[0054] Assuming that the camera has been calibrated, the focal length of the camera is f, and the distance between the camera and the object is Z, (u 0 , v 0 ) is the camera center, and the coordinates (X c , Y c ,Z c )for:
[0055] X c = Z f u - u 0 dx Y c = Z f v - ...
Embodiment approach 2
[0080] Embodiment 2. Underwater binocular stereo vision three-dimensional measurement method
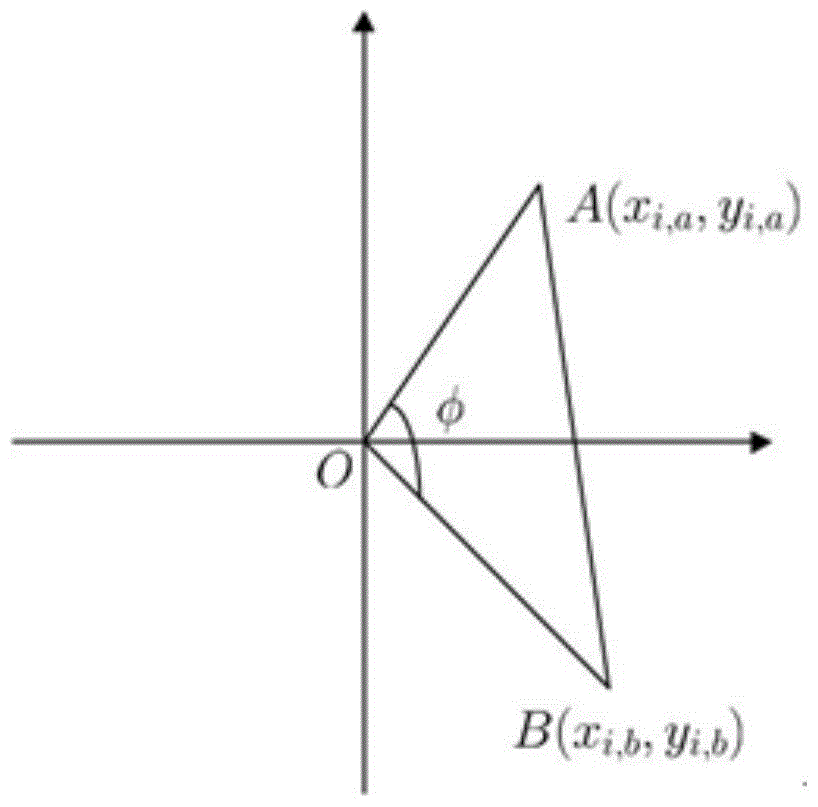
[0081] Underwater image correction and epipolar constraint are the key steps for underwater measurement, such as Figure 4 As shown, the two images formed by the known binocular vision are I l , I , in image I l mid point p l The corresponding point in the other image is p r , the epipolar constraint refers to passing through the point p l The position of can be calculated its corresponding epipolar line on another image, and its corresponding point must pass through the line.
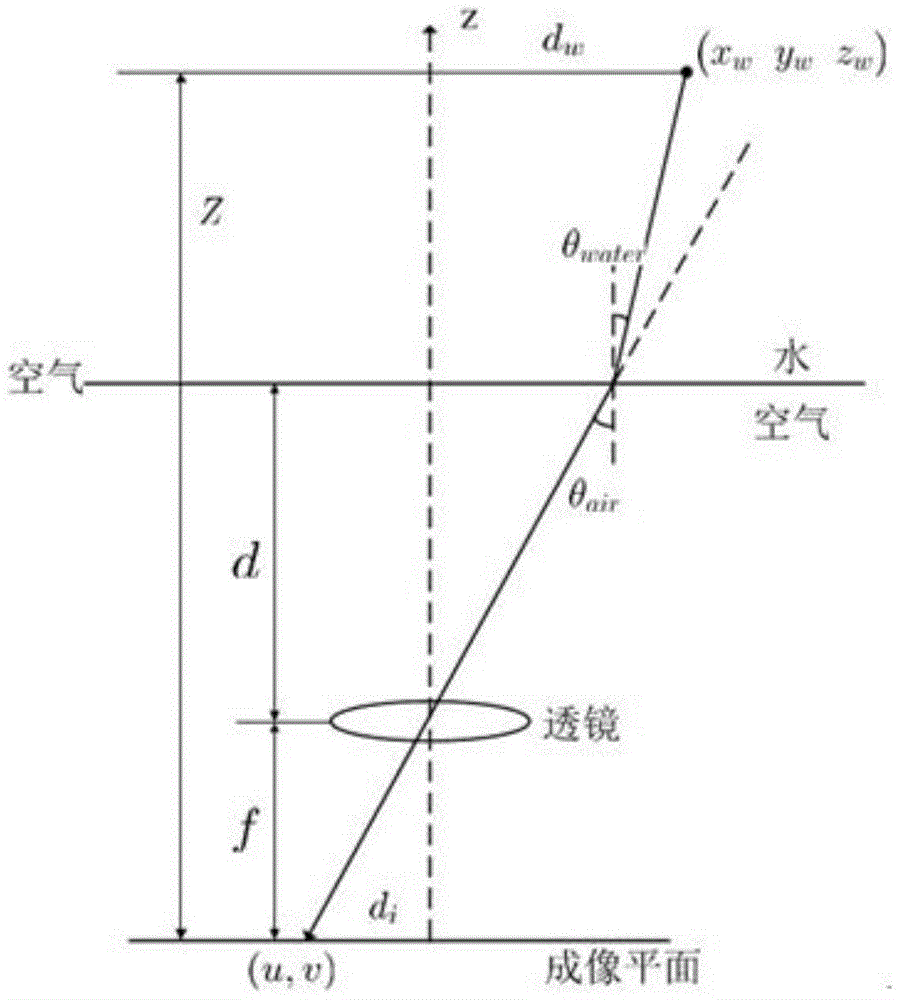
[0082] The method of obtaining the underwater epipolar line is as follows, and the underwater imaging model is established as formula (10):
[0083] k u v 1 = 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More