

Dynamic MEMS (micro-electromechanical systems) inertial attitude measuring system based on self-adaptive robust integration algorithm
A technology of measurement system and fusion algorithm, applied in directions such as navigation through velocity/acceleration measurement, which can solve the problems of estimation result error, attitude data delay, poor anti-interference ability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0079] The technical scheme of the patent of the present invention will be described in further detail below in conjunction with specific embodiments.
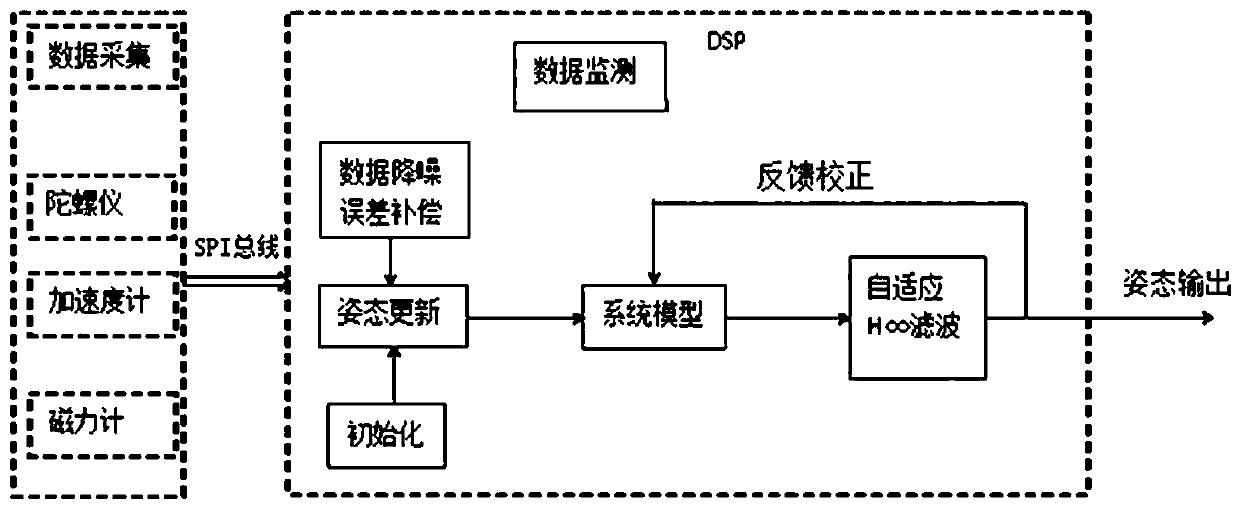
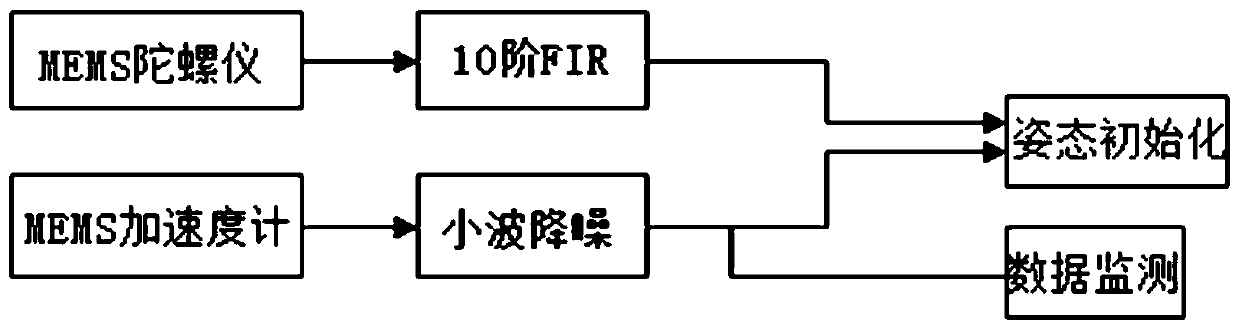
[0080] see Figure 1-2 , the specific technical scheme is as follows:
[0081] 1) System initialization and coordinate system protocol
[0082] The vehicle pose is the rotation angle of the vehicle's body coordinate system relative to a reference coordinate system. The reference coordinate system in this paper is selected as the east-north-sky navigation coordinate system, the body coordinate system is selected: front-left-up, and the positive angle is determined according to the right-hand rule.
[0083] Calculation formula of initial pitch angle:
[0084] Calculation formula of initial roll angle:
[0085] The initial heading angle calculation formula:
[0086] The strapdown attitude matrix is
[0087]
[0088] 2) Strapdown attitude update algorithm
[0089] The standard quaternion differential equation is:...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More