

Method and device for extraction of rod-shaped ground object
A feature and rod-shaped technology, which is applied in the field of rod-shaped feature extraction, can solve the problems of inability to meet the accuracy requirements of high-precision maps, at the level of half a meter or even a few meters, and achieve the effect of satisfying high efficiency and low cost and ensuring accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
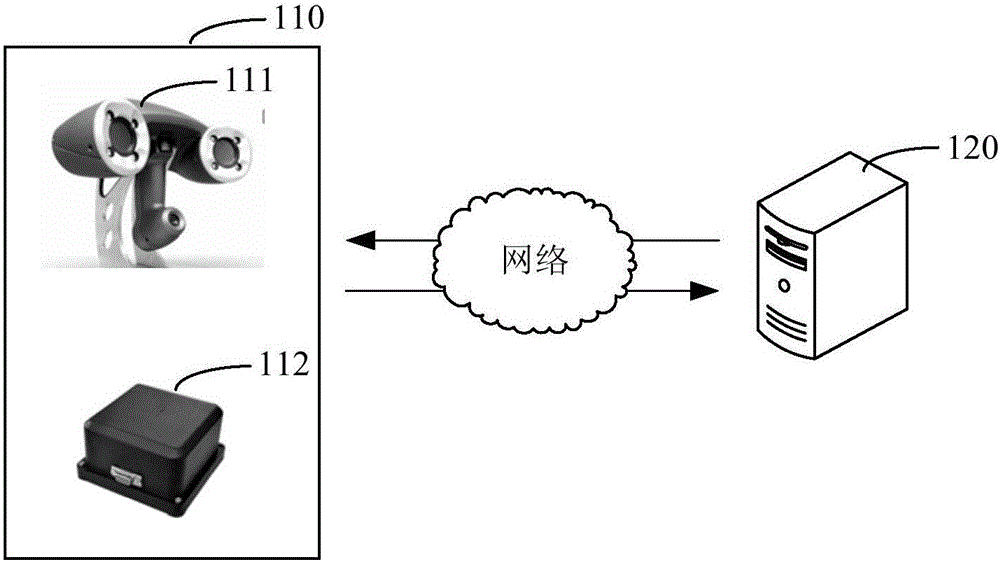
[0029] figure 1 It is an application environment diagram of the rod-shaped feature extraction method in an embodiment. Such as figure 1 As shown, the application environment includes a three-dimensional laser scanning system 110 and a server 120, wherein the three-dimensional laser scanning system 110 and the server 120 communicate through a network.
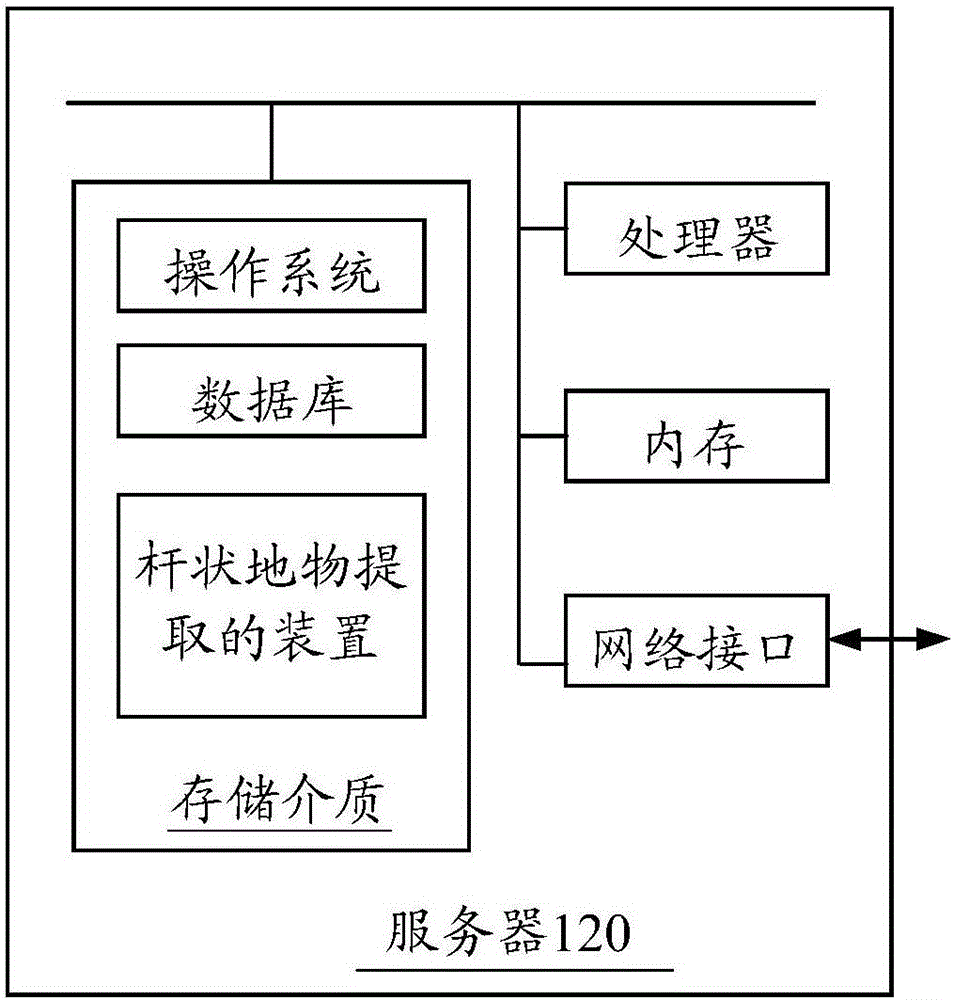
[0030] The three-dimensional laser scanning system 110 includes a three-dimensional laser scanner 111 and a navigation system 112. The three-dimensional laser scanner 111 is an instrument that can provide three-dimensional point cloud data on the surface of the scanned object. The navigation system 112 is a device for acquiring GPS (Global Positioning System, global positioning system) data. The system may be an inertial navigation system, etc., which can obtain geographic location data corresponding to each 3D laser point in the 3D laser point cloud data according to the correspondence between the 3D laser point cloud data and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More