

Gaussian filtering method based on multilayer importance sampling and Gaussian filter
A technology of importance sampling and Gaussian filtering, applied in the field of information fusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
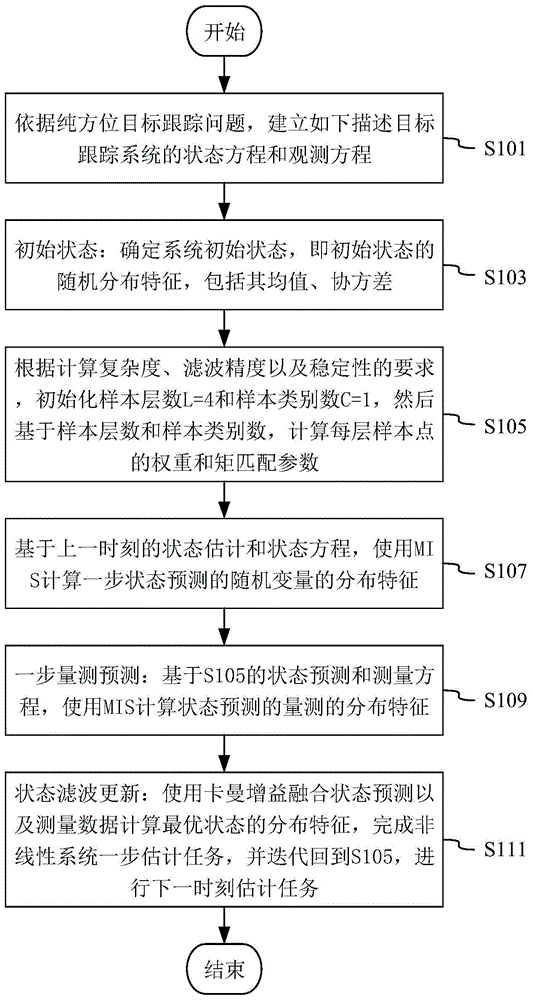
[0072] In the process of target tracking, the observation station can obtain target orientation information containing noise, and the relationship between orientation information and target position information to be estimated is nonlinear, and EKF, second-order UKF, third-order CKF or fifth-order CKF nonlinearity are usually used Filtering method to obtain the motion state of the target. However, the above filtering methods cannot meet the requirements in the occasions where the target positioning requirements are high. The method provided by the invention has higher estimation accuracy than the existing methods, and can improve the accuracy of target tracking. The advantages of the present invention are illustrated below with specific implementation examples. See figure 1 , as follows:
[0073] S101: According to the pure orientation target tracking problem, establish the state equation and observation equation describing the target tracking system as follows:
[0074] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More