Snorkeling control method for cable-free autonomous underwater vehicle
A technology of underwater robot and control method, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as strong coupling and underactuation of underwater robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention is described in detail below in conjunction with accompanying drawing.
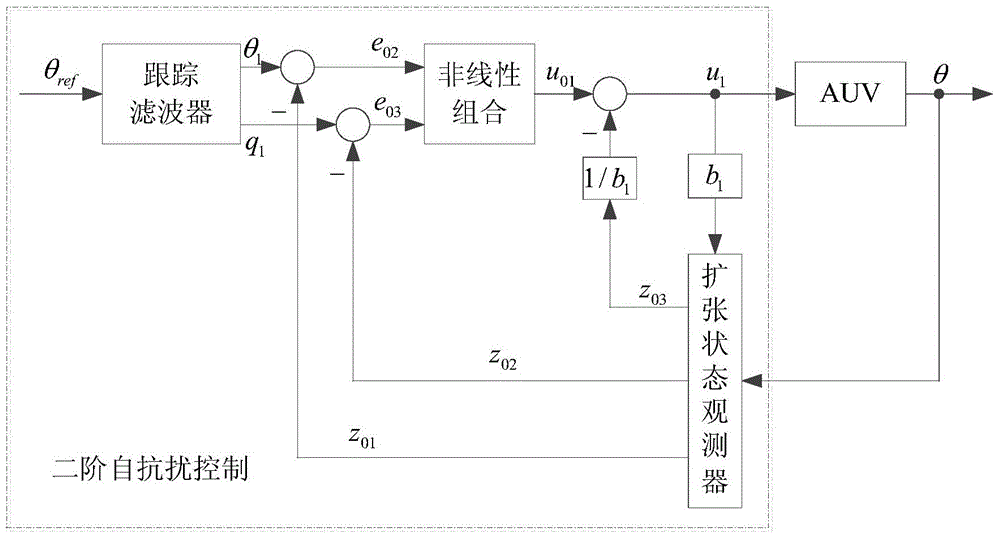
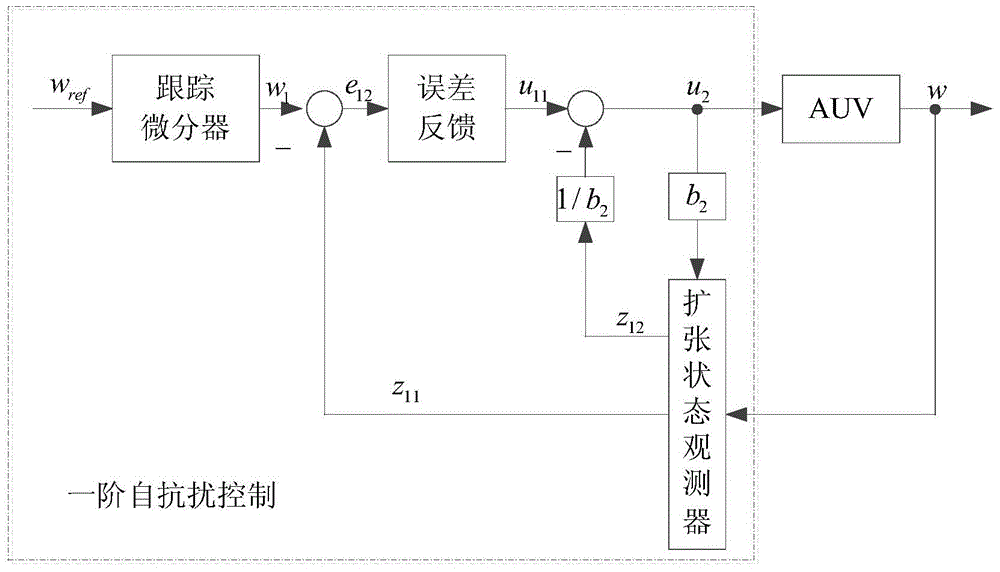
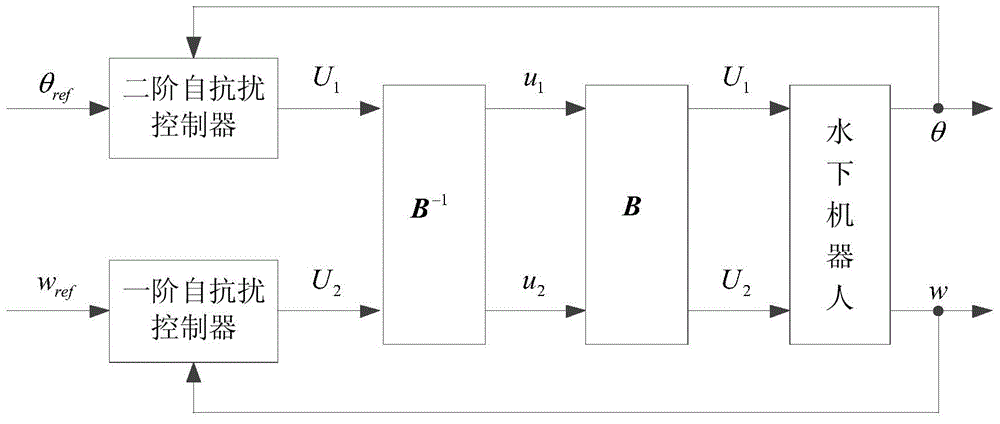
[0044] The cable-free autonomous underwater robot diving and floating control method based on the active disturbance rejection control technology of the present invention comprises the following steps:
[0045] Step 1: Establish a cable-free autonomous underwater vehicle system model, which is described as follows:
[0046] 1 0 0 0 I y - M q . - mx G - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More