

Robot, robot system, control apparatus, and control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
[0087] Hereinafter, a first embodiment of the present invention will be described with reference to the drawings.
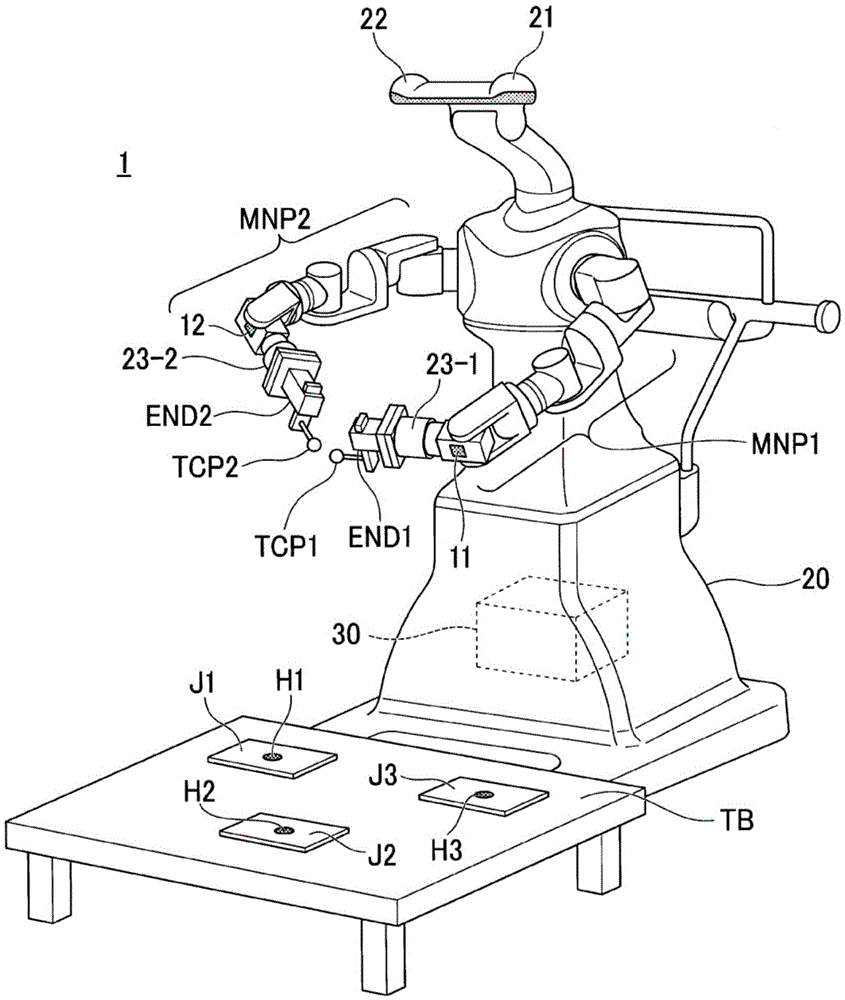
[0088] figure 1 It is a configuration diagram showing an example of the robot system 1 of the present embodiment.
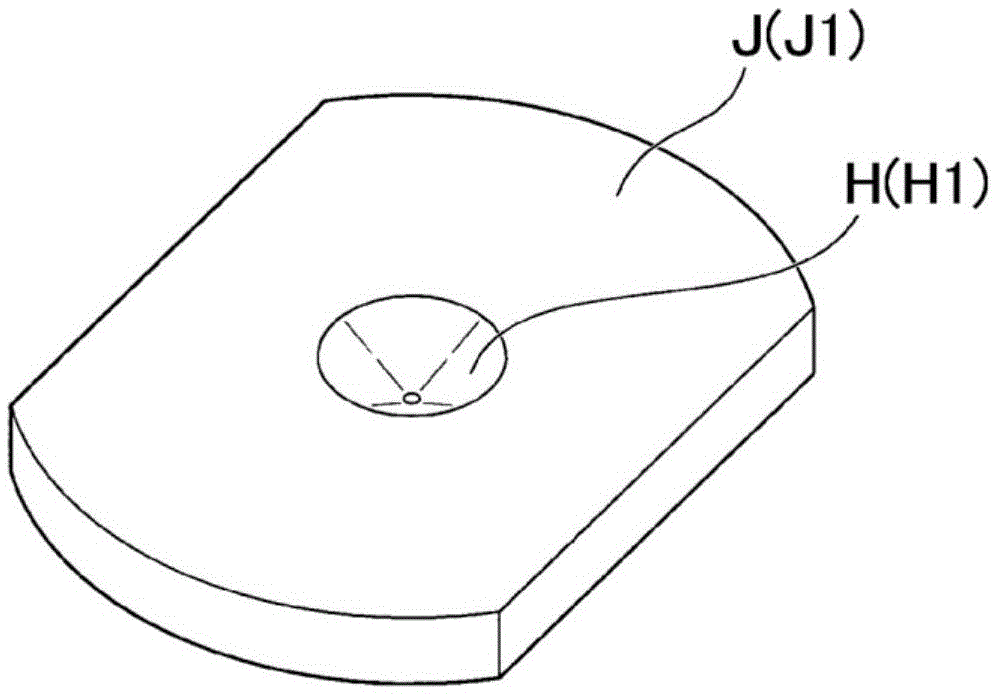
[0089] The robot system 1 includes a robot 20 and a control device 30 . The robot system 1 calibrates the manipulator included in the robot 20 using a plurality of jigs. In this example, robot system 1 is using figure 1 Three jigs J1 to J3 are shown as the configuration of the above-mentioned plurality of jigs, but a configuration using four or more jigs is also possible. Hereinafter, as long as the jigs J1 to J3 are not distinguished and described, they will be collectively referred to as jig J and described.
[0090]Here, calibration of the manipulator performed by the robot system 1 will be described. The robot system 1 acquires information indicating the rotation angle of each of the plurality of actuators included in the manipulator of the...
no. 2 approach
[0211] Hereinafter, a second embodiment of the present invention will be described with reference to the drawings.
[0212] Figure 10 It is a configuration diagram showing an example of the robot system 2 of the present embodiment. In addition, in 2nd Embodiment, the same code|symbol is attached|subjected to the same component part as 1st Embodiment, and description is abbreviate|omitted.
[0213] The robot system 2 includes a robot 20 and a control device 30 . Robot System 2 uses Figure 10 The illustrated jig J1 calibrates the manipulator included in the robot 20 . Here, calibration of the manipulator performed by the robot system 2 will be described. The robot system 2 acquires information indicating the rotation angle of each of the plurality of actuators included in the manipulator of the robot 20 from an encoder connected to (or provided with) each actuator. Hereinafter, for convenience of description, the rotation angle of the actuator may be simply referred to as...
no. 3 approach
[0275] Hereinafter, a third embodiment of the present invention will be described with reference to the drawings.
[0276] Figure 12 It is a configuration diagram showing an example of the robot system 3 of the present embodiment.
[0277] The robot system 3 of the third embodiment includes a robot 20a and a control device 30a. In addition, in the third embodiment, the same reference numerals are assigned to the same components as those in the second embodiment, and description thereof will be omitted.
[0278] The robot system 3 calibrates the first manipulator MNP1 and the second manipulator MNP2 by the method described in the second embodiment, and then causes the robot 20a to rearrange the work object M placed on the upper surface of the work table TB. Jobs at specified locations. Hereinafter, this operation will be referred to as a predetermined operation and will be described. When performing this predetermined work, in the robot system 3, the rotation angle of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More