

Four-degree-of-freedom parallel mechanism
A degree of freedom and parallel technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of many singular configurations, limited working space, and difficult processing, and achieve less singular configurations, good dynamic response, Achieve lightweight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Hereinafter, the preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings in order to understand the purpose, features and advantages of the present invention more clearly. It should be understood that the embodiments shown in the drawings are not intended to limit the scope of the present invention, but merely to illustrate the essential spirit of the technical solution of the present invention.
[0041] Term description:
[0042] The first plane: refers to the plane parallel to the YOZ plane in the coordinate system of the drawings in this article;
[0043] The second plane: refers to the plane parallel to the XOZ plane in the coordinate system of the drawings in this article.
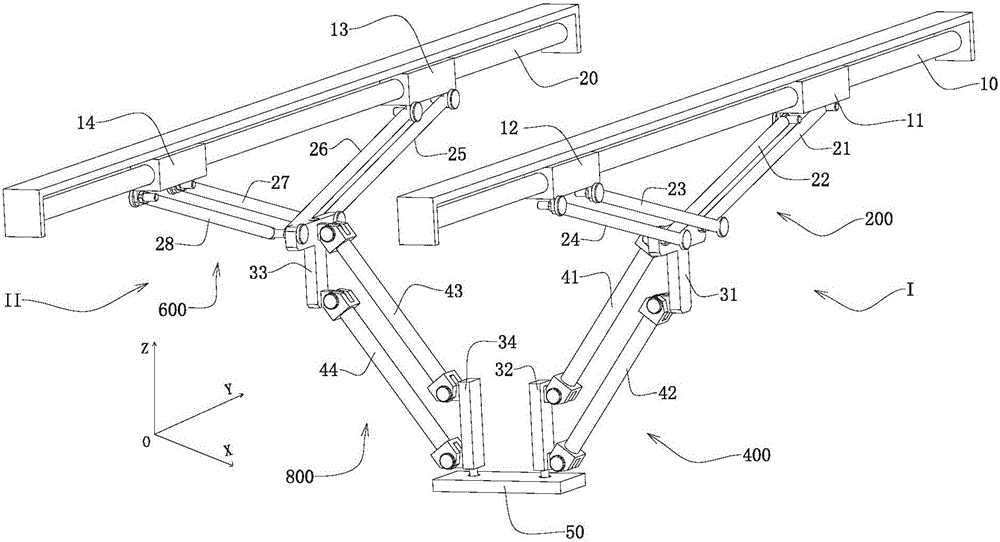
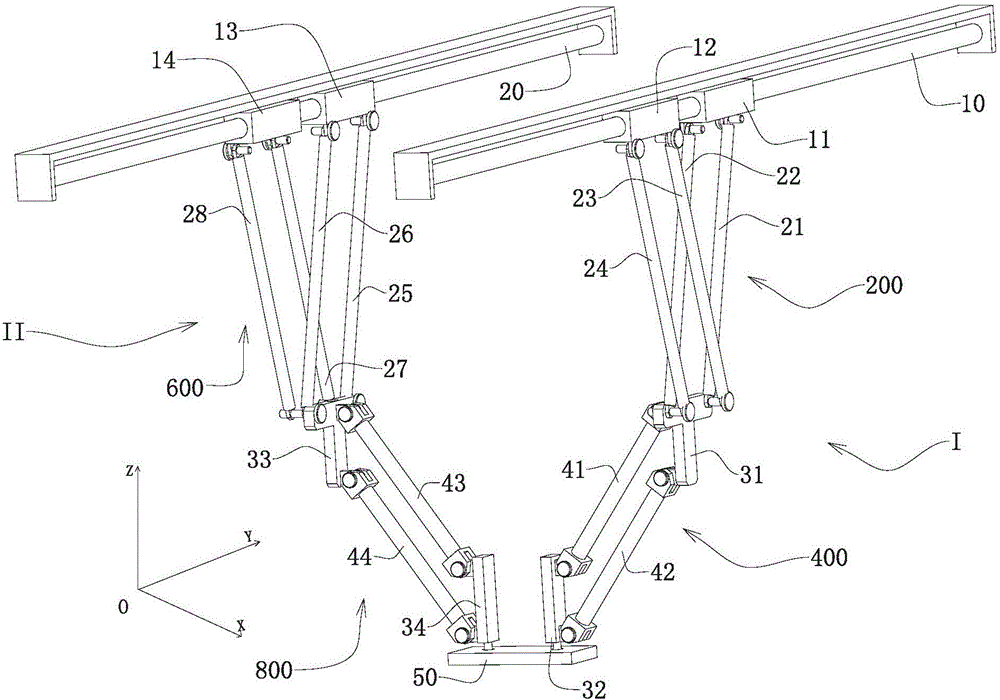
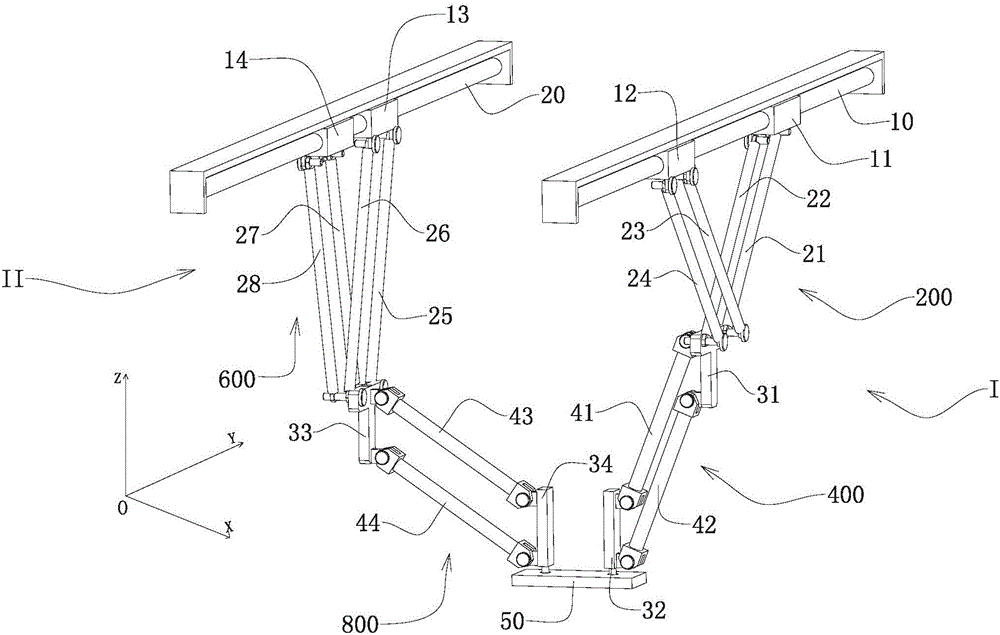
[0044] The parallel mechanism of the present invention usually includes a fixed platform, a moving platform, a first branch chain and a second branch chain. The first branch chain and the second branch chain are respectively connected with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More