

Path control method and system for robot
A path control and robotics technology, applied in the field of robotics, can solve the problems of unsightly walking posture of robots, high requirements for robot walking speed, and high requirements for planning paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] In order to more clearly illustrate the technical solutions in the embodiments of the present invention or the prior art, the accompanying drawings that need to be used in the description of the embodiments or the prior art will be briefly introduced below. The invention is exemplary and should not be construed as limiting the invention. The following description describes numerous specific details to facilitate an understanding of the present invention. However, in certain instances, well-known or conventional details are not described in order to satisfy the requirement of conciseness of the description.
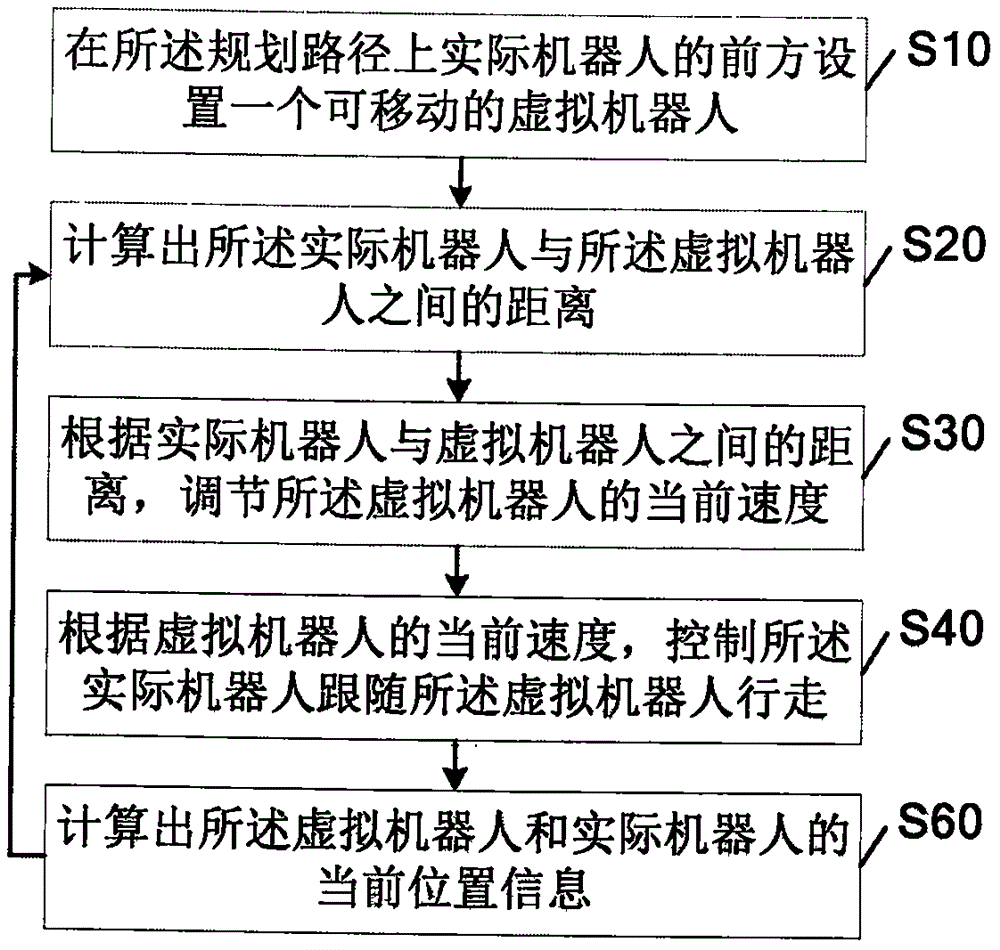
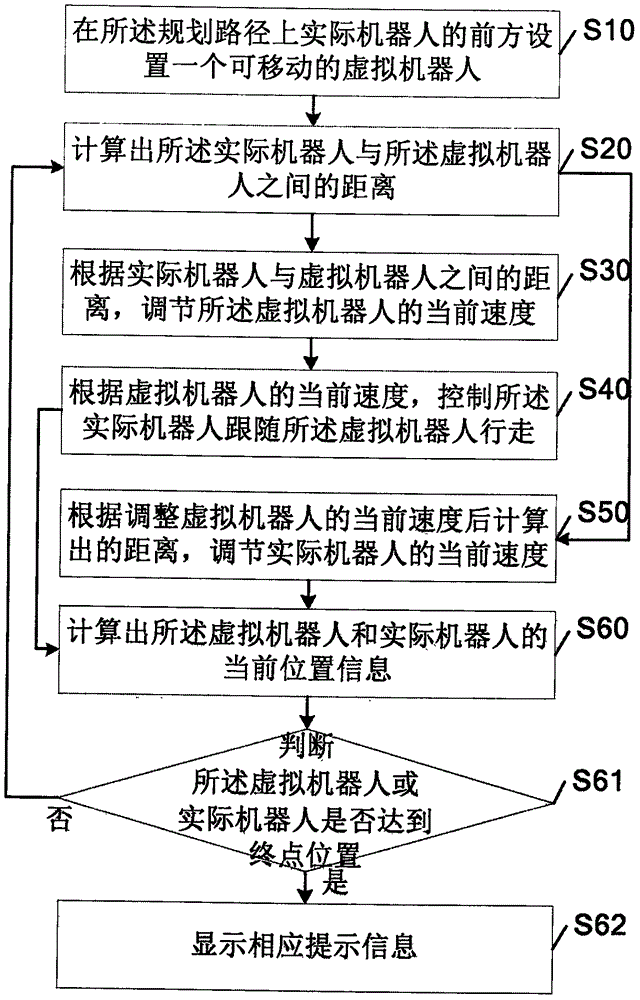
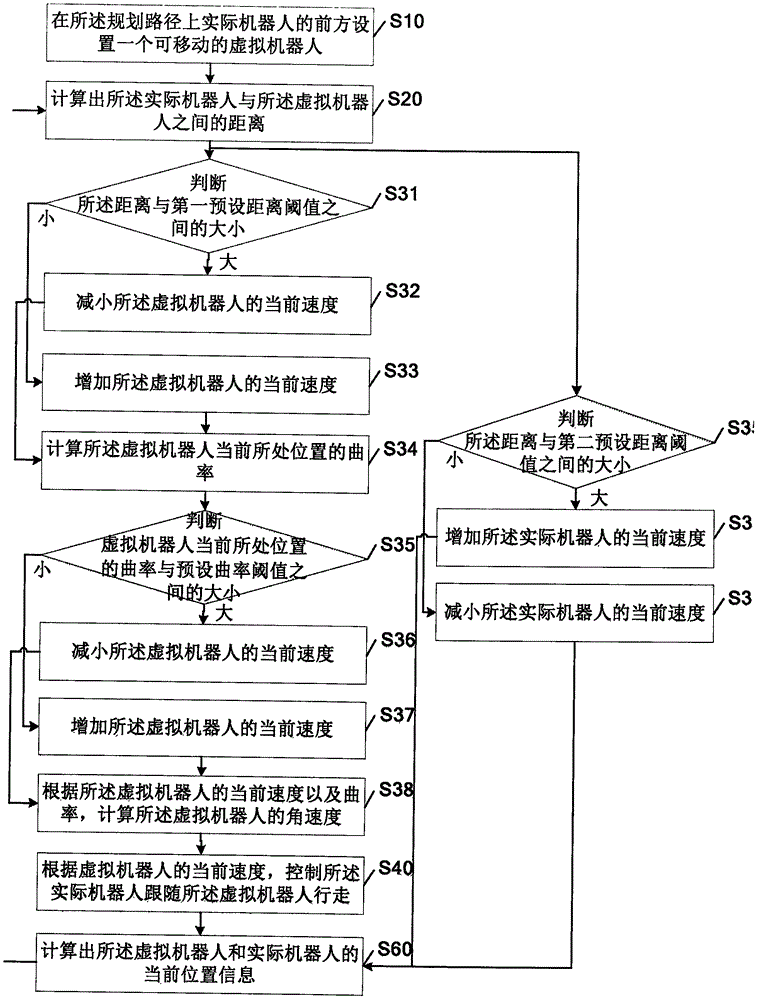
[0095] Such as figure 1 As shown, according to an embodiment of the present invention, a path control method for a robot includes the following steps:
[0096] For the grid map input by S01, the size of each grid can be set to 5cm*5cm; choose a point on the map as the initial position, and then choose another point on the map as the end position, between the initi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More