

Carding type branched fruit picking robot
A picking robot and branch-like technology, which is applied in the field of combing branch-like fruit picking robots, can solve problems such as bulky volume and limited application scope.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
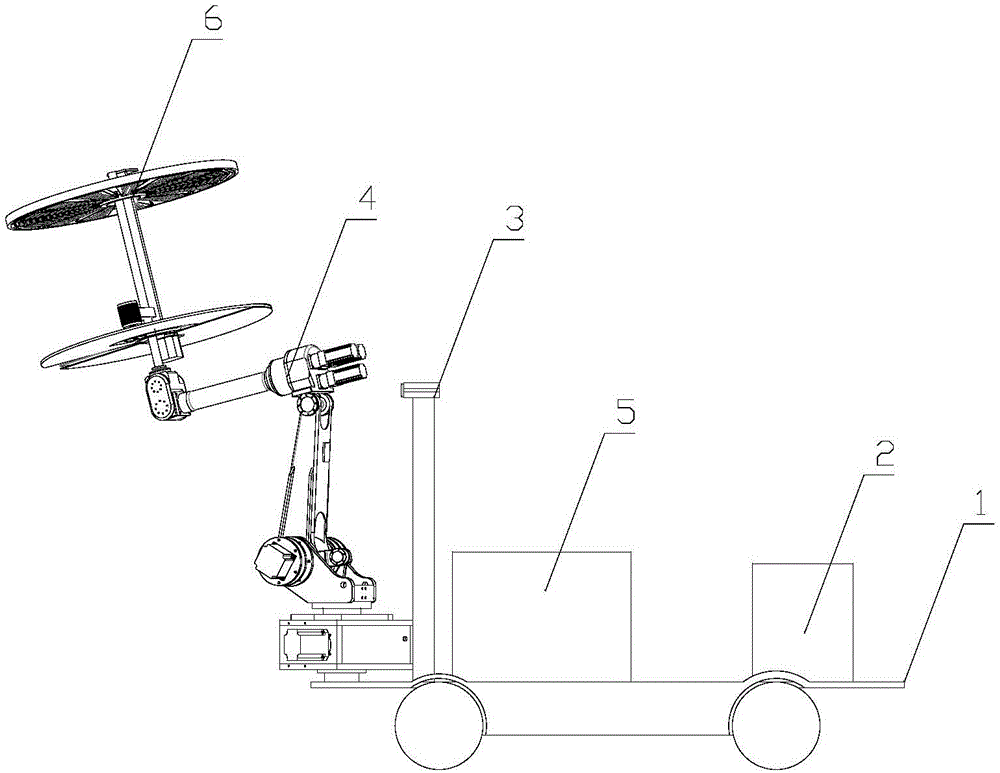
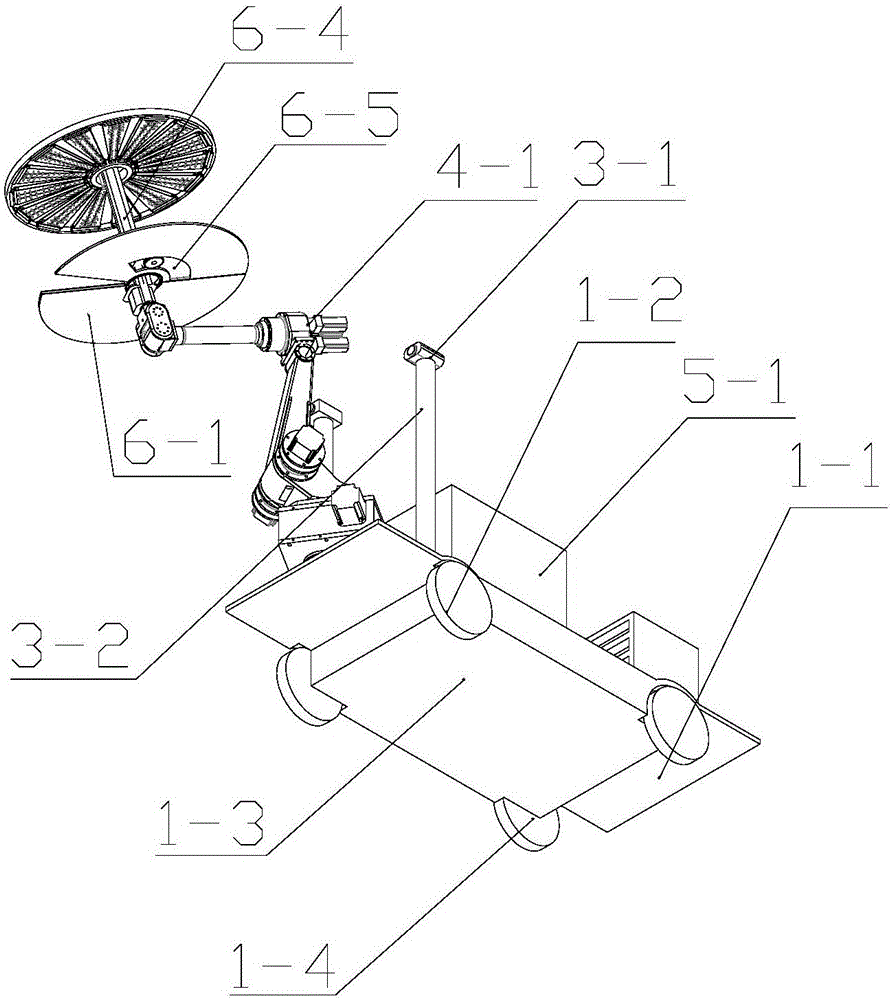
[0061] like figure 1 , 2 , 3 and 4. A comb-type branch-shaped fruit picking robot includes a picking mobile platform 1, a control cabinet 2, a machine vision system 3, a picking robot arm 4, a fruit collection box 5 and a comb-type picking tray 6. The picking mobile platform 1 is a four-wheel smart car with a power drive device 1-1 and a steering device 1-2, and the power drive device 1-1 drives the picking robot to walk in a straight line, including motions such as uniform speed, acceleration and deceleration; The device 1-2 controls the picking robot to make a turning function, including turning left and turning right. The picking mobile platform also includes a mobile platform body, mobile wheels and the like.
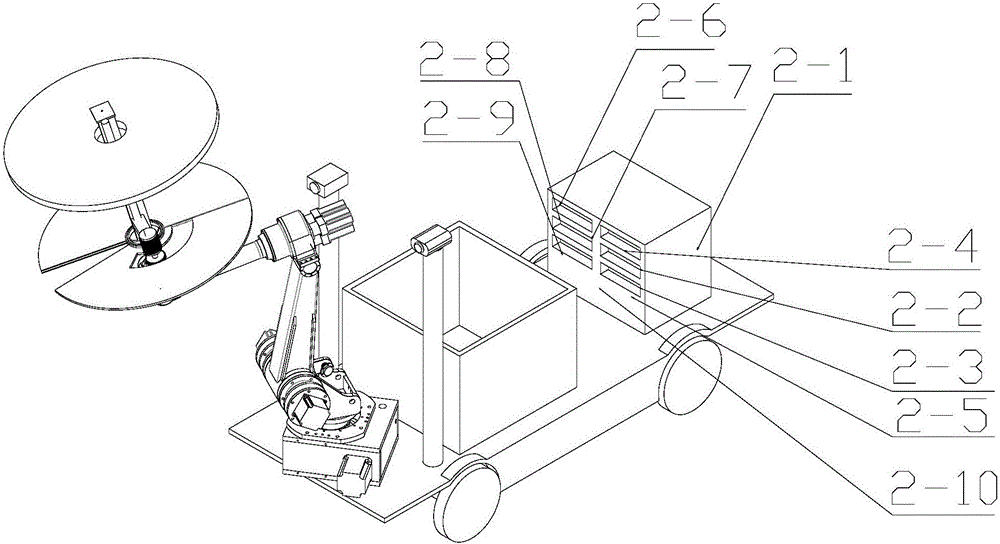
[0062] The control cabinet 2 is a rainproof cabinet that integrates all electric control modules of the picking robot including a control module, a drive module and a power supply, and includes a control iron box 2-1, a main control module 2-2, an image processin...
Embodiment 2
[0081] like Figure 1-8 shown. The invention not only proposes a combing type branch-shaped fruit picking robot, but also proposes a corresponding combing type branch-shaped fruit picking method. Specific steps are as follows:
[0082] A comb-type branch-shaped fruit picking robot includes a picking mobile platform 1, a control cabinet 2, a machine vision system 3, a picking robot arm 4, a fruit collection box 5, and a comb-type picking tray 6.
[0083] S1: First, the GPS differential module 2-4 sends the collected coordinate position of the picking robot to the main control module 2-2, and the inertial navigation module also sends the navigation information to the main control module 2-2.
[0084]S2: The main control module 2-2 drives the picking mobile platform 1 to move by controlling the mobile platform driving module 2-6. The picking mobile platform 1 has a power drive device 1-1 and a steering device 1-2, and is a four-wheel The smart car first drives the picking robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More