

Automatic butt assembling method for large part as well as system
A technology of automatic docking and assembly method, applied in assembly machines, complex mathematical operations, instruments, etc., can solve the problems that the actual parameters cannot be completely matched with the design parameters, cannot be assembled at one time, and are not taken into account, so as to avoid errors and ensure Quality and success rate, effect of reducing impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
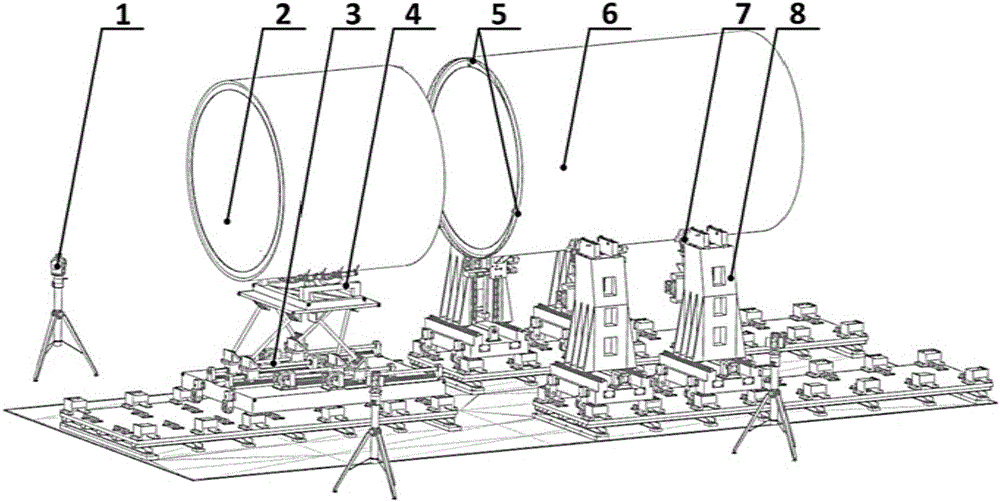
[0044] like figure 1 As shown, this embodiment includes: a parallel servo attitude adjustment positioner 3, a tower servo attitude adjustment positioner 8, a control module and a laser tracker 1, wherein: a parallel servo attitude adjustment positioner 3 and a tower servo attitude adjustment positioner 8. Relatively arranged on the base 10, the laser tracker 1 is arranged around the base 10 to measure the first docking part 2, the second docking part 6, the parallel servo attitude adjustment positioner 3 and the tower servo attitude adjustment positioner 8. After receiving the position information, the control module sends the drive amount information of each axis to the parallel servo attitude adjustment positioner 3 and the tower servo attitude adjustment positioner 8 .
[0045] The parallel servo attitude adjustment positioner 3 is used for loading the docking cylinder section as the first docking part 2 , and the tower servo attitude adjustment positioner 8 is used for loa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More