

Gyro-free inertial system error calibration method
An inertial system and error calibration technology, applied in the field of inertial navigation, can solve the problems of no gyro inertial system error, accelerometer installation error cannot be estimated and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The drawings constituting a part of the present application are used to provide a further understanding of the present invention, and the exemplary embodiments and descriptions of the present invention are used to explain the present invention, and do not constitute an improper limitation of the present invention.
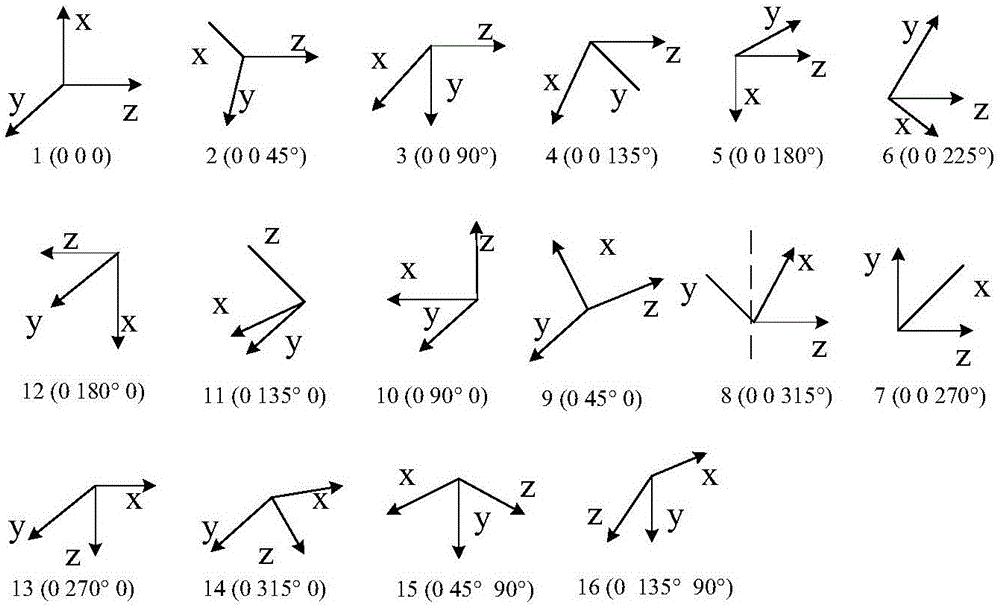
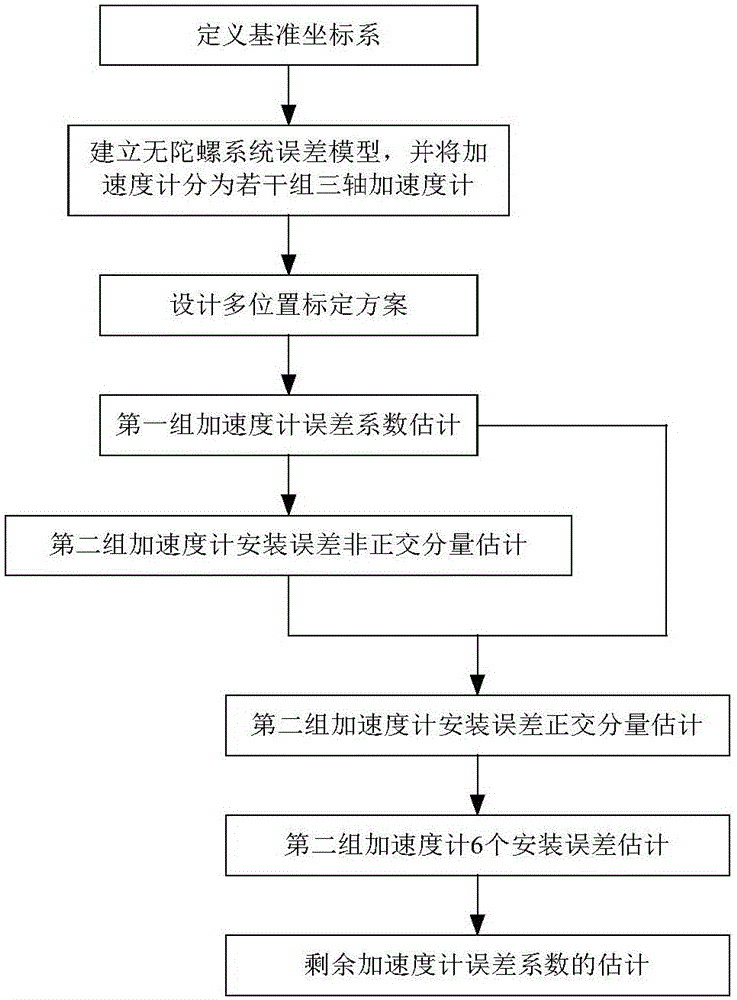
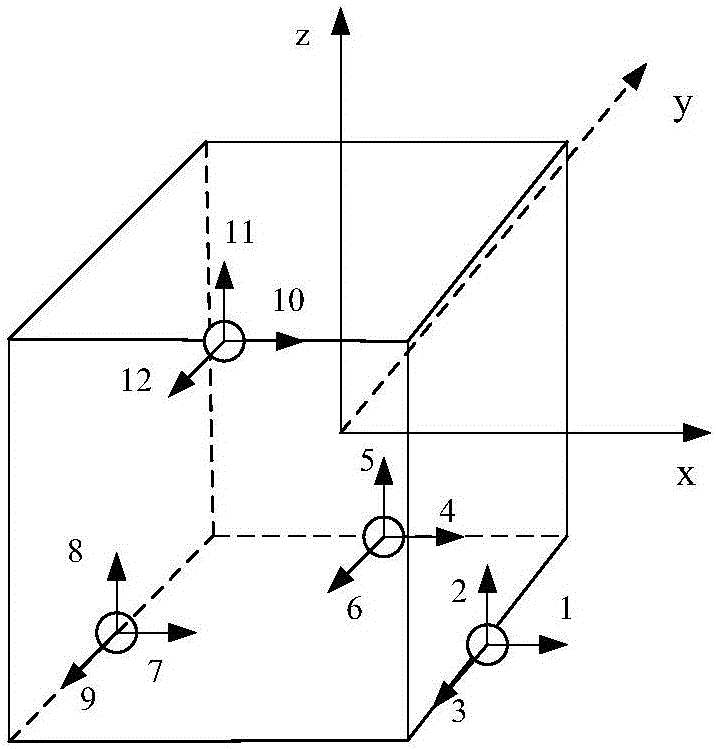
[0069] The method provided by the present invention takes advantage of the constant value of the gravity vector modulus at any point on the earth, by changing the attitude of the three-axis of the gyro-free inertial system relative to the ground, all acceleration output combinations at multiple attitude positions are obtained, and the nonlinear iterative method is used to estimate The zero offset coefficient, scale factor error, and installation error of all accelerometers are calculated. For the convenience of description, the method provided by the present invention is only applicable to the case where the non-gyro inertial system includes N=3n (n is a positiv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More