

Humanoid hand control system based on data glove
A data glove and control system technology, which is applied in the field of humanoid manipulators, can solve the problems of complex development and lack of productization, and achieve the effects of simple operation, improved interactivity, and wide application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with specific examples.
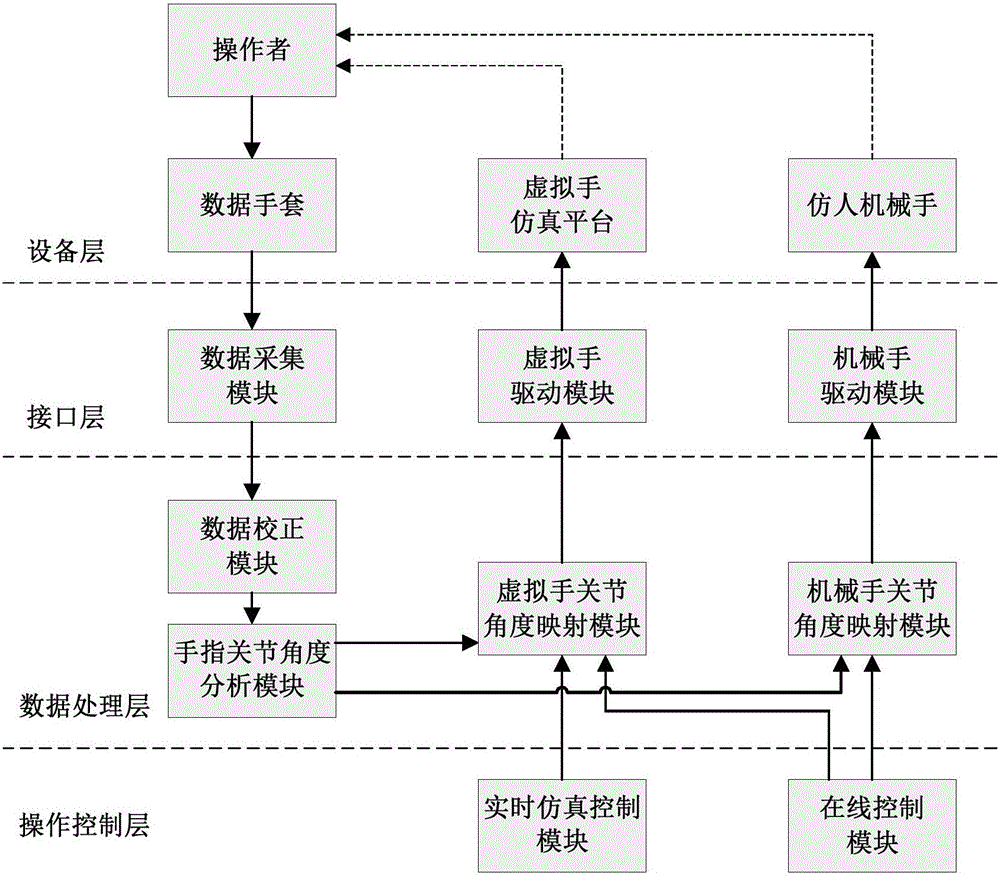
[0048] like figure 1 As shown, the humanoid manipulator control system based on the data glove of the present invention includes:
[0049] The operation control layer is mainly responsible for setting different control methods, including real-time simulation control and online control. This layer sets the current control method for the humanoid manipulator through the selection of the control method by the operator, and according to different control methods carry out different operational controls;
[0050] The data processing layer is mainly responsible for analyzing and processing the collected data, correcting and analyzing the data collected from the data glove, and mapping the analyzed finger joint angle information to the joint angle of the simulated virtual hand and humanoid manipulator according to the rules , which includes a data correction module, a finger joint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More