

Autonomous obstacle avoidance navigation information sharing and using method
A navigation information and navigation system technology, applied in the field of autonomous obstacle avoidance navigation system, can solve problems such as time-consuming and energy-consuming calls, achieve the effects of reducing requirements, improving construction capabilities and accuracy, and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the drawings.
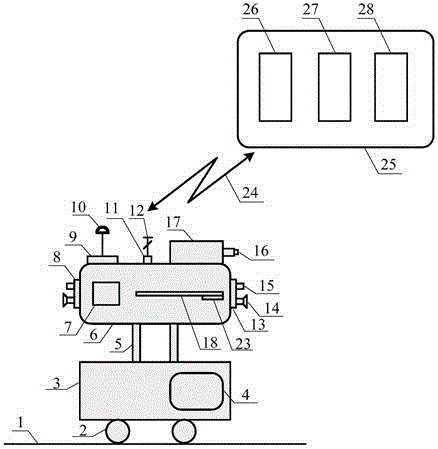
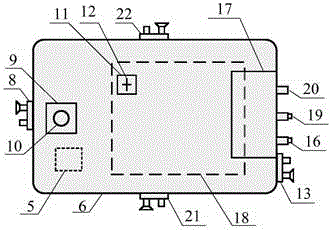
[0035] Such as figure 1 As shown, the present invention includes the main structure of the autonomous obstacle avoidance navigation system 6, inertial IMU module 7, rear-view ultrasonic module 8, front-view ultrasonic module 13, right-view ultrasonic module 21, left-view ultrasonic module 22, GPS module 9, and wireless network Module 11, RGB-D sensor module 17, and obstacle avoidance navigation circuit board 18. Among them, the rear-view ultrasonic module 8, the front-view ultrasonic module 13, the right-view ultrasonic module 21, and the left-view ultrasonic module 22 are respectively installed in the autonomous obstacle avoidance navigation system Around the main structure 6, it is responsible for real-time monitoring of obstacles in four directions, and the detection results are sent to the obstacle avoidance navigation circuit board 18. The obstacle avoidance navigation c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More