Helicopter multi-frequency vibration active control method
An active control and helicopter technology, applied in mechanical oscillation control, non-electric variable control, control/regulation system, etc., can solve the problems of external disturbance structural parameter changes, large control interval, slow convergence process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
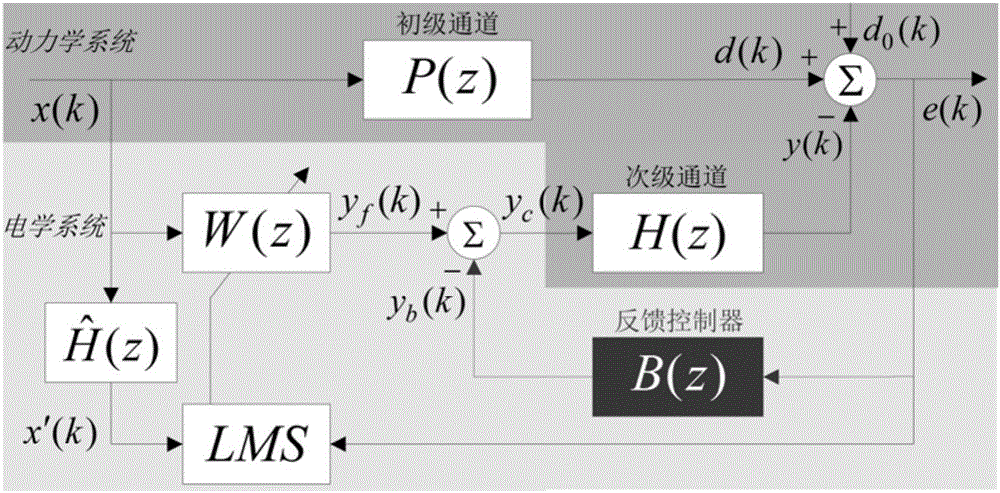
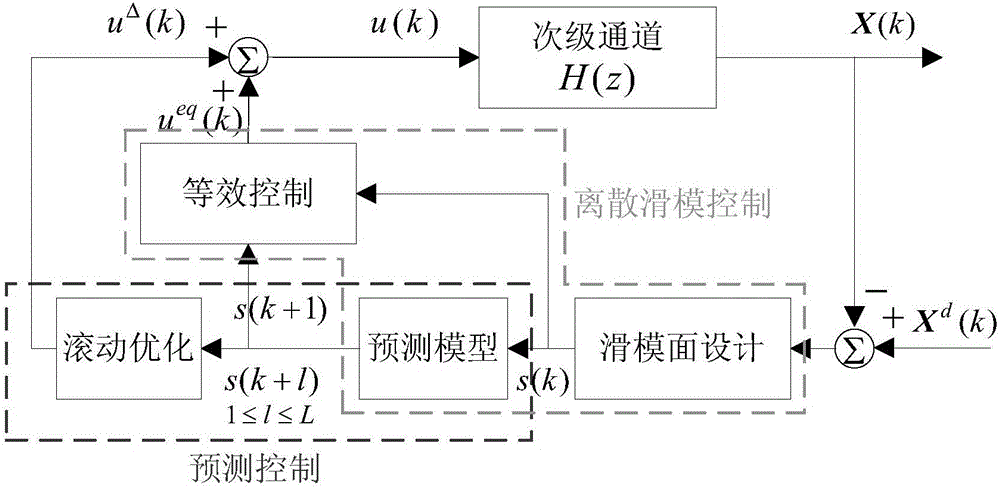
[0040] The technical idea of the present invention is: for the multi-frequency vibration active control system of the helicopter, first carry out system identification, and design a discrete predictive sliding mode feedback controller according to the identification result, and then use the obtained reference signal and error signal to perform feedforward-feedback hybrid control The controller iteration and the output of the control quantity realize the effective control of the multi-frequency vibration of the helicopter. The active control method of helicopter multi-frequency vibration of the present invention is realized through the following steps:
[0041] Step 1, System Identification
[0042] Collect the control voltage of the actuator and the acceleration response at the controlled point, use the recursive least squares algorithm for system identification, and finally obtain the discrete state space equation of the secondary channel;
[0043] Step 2, Feedback Control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More