

ORB key frame closed-loop detection SLAM method capable of improving consistency of position and pose of robot
A closed-loop detection and key frame technology, which is applied in the direction of instruments, manipulators, program-controlled manipulators, etc., can solve the problems of low quality of environmental map construction, poor positioning consistency, and low optimization efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with the accompanying drawings.
[0066] refer to Figure 1 to Figure 5 , an ORB keyframe closed-loop detection SLAM method that can improve the consistency of robot poses, including the following steps:
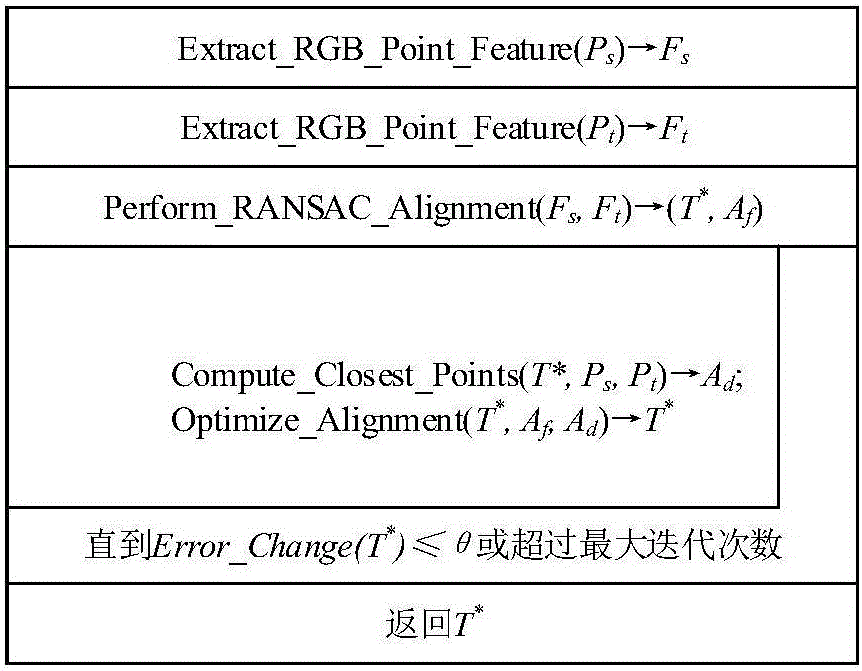
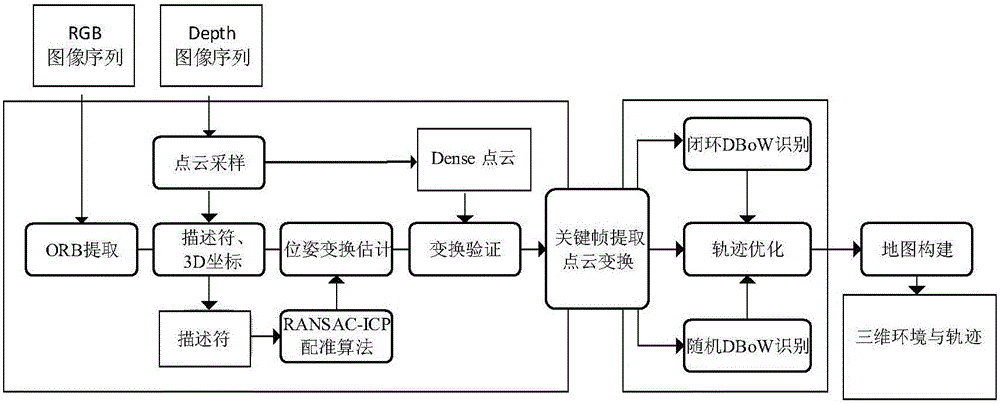
[0067] First, the RGB-D sensor is used to obtain the color information and depth information of the environment, and the ORB (oriented FAST and rotated BRIEF) feature is used to extract image features;
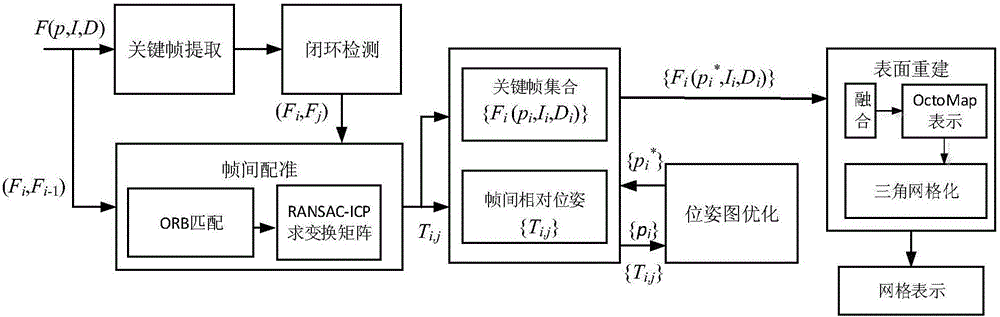
[0068] Then, the robot pose estimation is realized through the RANSAC-ICP inter-frame registration algorithm, and the initial pose graph is constructed;
[0069] Finally, BoVW (Bag of Visual Words) is constructed by extracting the ORB features in the KeyFrame key frame. The current key frame is compared with the words in BoVW to achieve closed-loop key frame detection, and the pose graph is added through key frame inter-frame registration detection. Constraints, get the global optimal robot pose. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More