

A vehicle autonomous parking path planning method for multiple parking scenarios
A technology for autonomous parking and path planning, applied in the direction of control devices, etc., can solve problems such as impeding vehicle driving, undetected collisions, and accidents.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
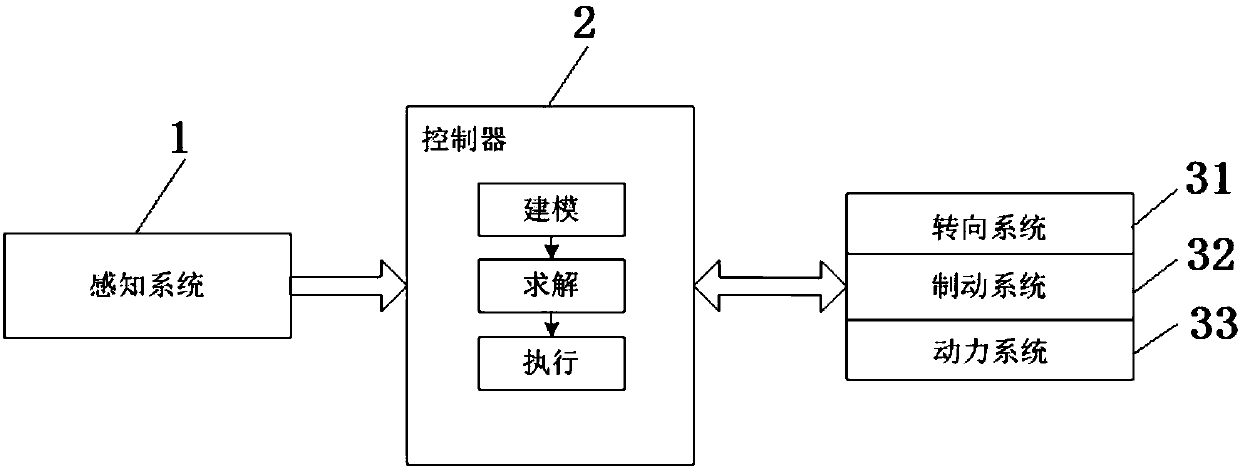
[0056] Such as figure 1 As shown, the autonomous parking system includes a perception system 1 , a controller 2 , a steering system 31 , a braking system 32 , and a power system 33 of the vehicle. The perception system 1 includes one or more sensors, such as ultrasonic-based sensors, vision-based sensors or laser-based sensors, which can detect information about surrounding obstacles, detect parking space information, and set the target state of the vehicle. Then send the above information to the controller 2. The controller 2 receives the obstacle information, target parking space information and target state information sent by the sensing system 1, then models and solves the parking problem according to the method of the present invention, and finally executes the planned path. The steering system 31 , braking system 32 and power system 33...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More