

Unmanned aerial vehicle path planning method based on PH curve
A path planning and unmanned aerial vehicle technology, which is applied in vehicle position/route/height control, instruments, three-dimensional position/course control, etc. avoid obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only limited to illustration and explanation of the present invention, and are not intended to limit the present invention. invention.
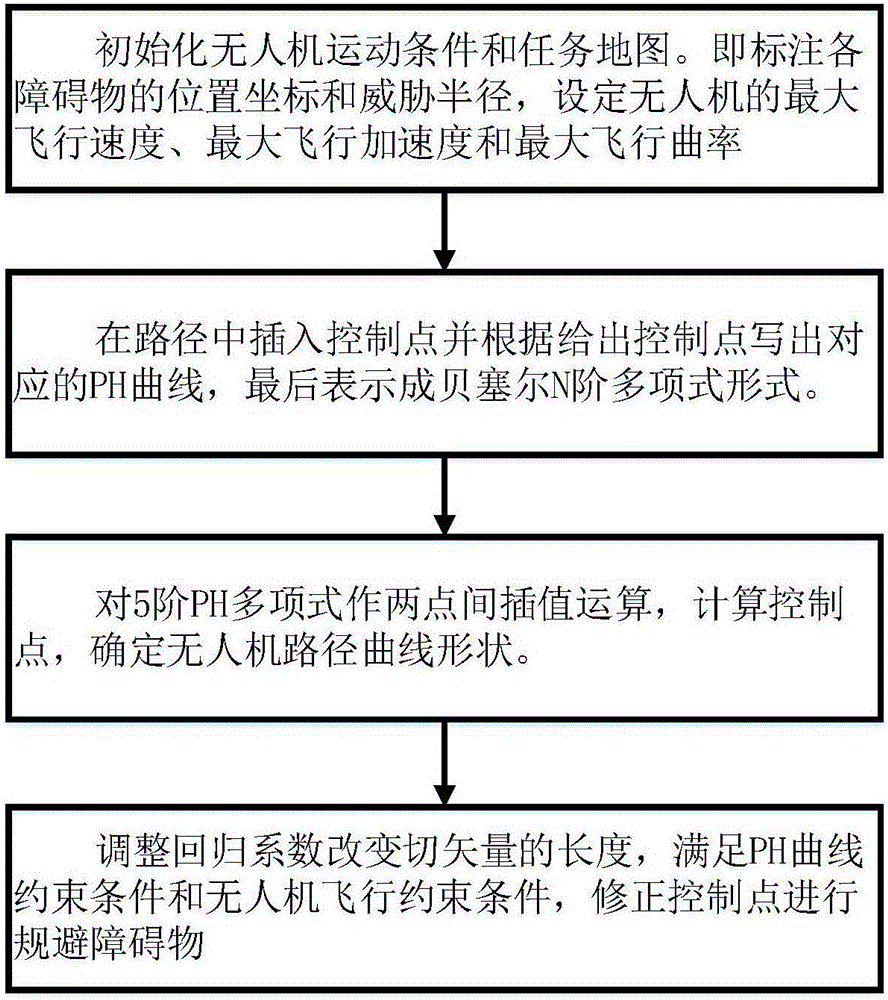
[0042] Such as figure 1 According to an embodiment of the present invention, a path planning method for an unmanned aerial vehicle to avoid obstacles based on a PH curve and a harmony search algorithm includes the following steps:
[0043] (1) Initialize the motion conditions and mission map of the UAV, mark the position coordinates and threat radius of each obstacle, and set the maximum flight speed, maximum flight acceleration, and maximum flight curvature of the UAV;
[0044] This step specifically includes initializing the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More