

Minimum variance-based nonlinear model prediction controller design method for permanent magnet servo system
A nonlinear model and predictive controller technology, applied in the control of electromechanical brakes, control systems, and generators, etc., can solve problems such as difficulty in achieving high-performance motor control, large actual deviation, and failure to achieve optimal control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
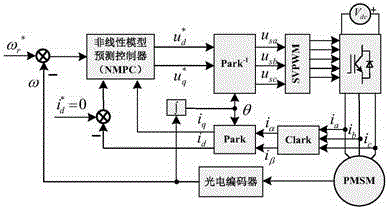
[0069] figure 1 For the general block diagram of the servo control system required by the present invention, as figure 1 As shown, the rotor position signal θ of the PMSM servo system is obtained through a photoelectric encoder.
[0070] In the first step, the three-phase current i of the PMSM stator is obtained by sampling the current sensor a i b and i c , and then transformed into the d-axis current i in the two-phase rotating coordinate system through Clark transformation (3s / 2s) and Park transformation (2s / 2r) d and q-axis current i q .
[0071] According to the voltage equation (30), flux equation (31), torque equation (32) and motion equation (33) of the PMSM system in the two-phase rotating dq coordinate system, its differential equation (34) is obtained.
[0072]
[0073]
[0074]
[0075]
[0076]
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More