

Quadrotor Attitude Calculation Method Combining Conjugate Gradient and Extended Kalman Filter
An extended Kalman and conjugate gradient technology, which is applied in the direction of navigation calculation tools, etc., to achieve the effects of easy tracking, reduced calculation amount, and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Attached below Figure 1-6 The present invention is described in detail with reference to the examples and the present invention is not limited to the given drawings and examples.
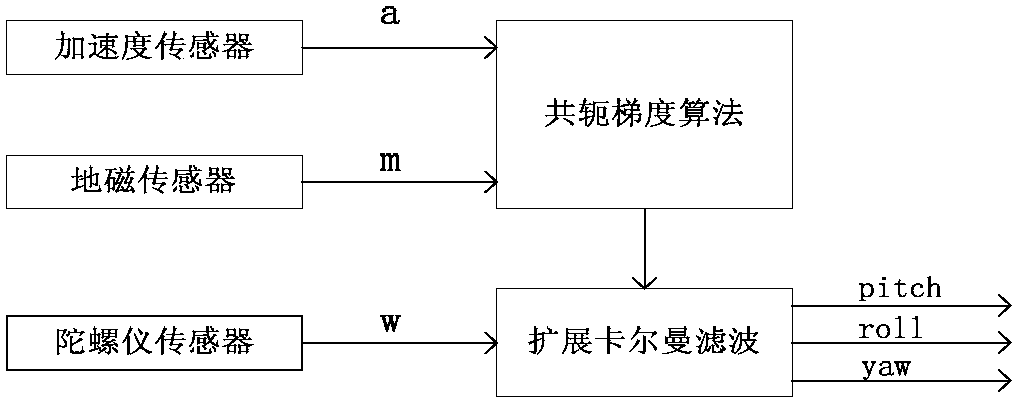
[0044] The overall process of the quadrotor attitude calculation method combined with conjugate gradient and extended Kalman filter implemented according to the present invention is as follows: image 3 and 4 . It is characterized in that comprising the steps of:
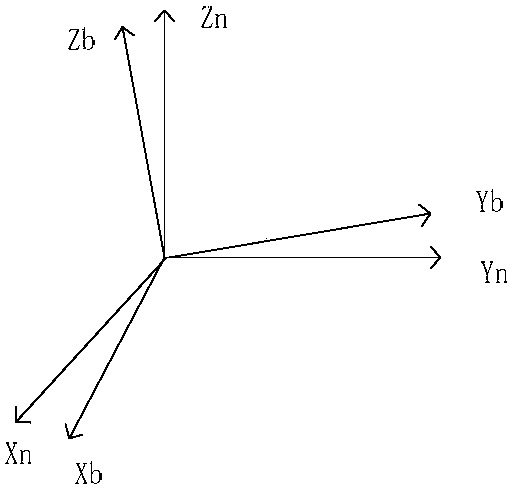
[0045] Step S1: Collect sensor information: In the body coordinate system, collect the state information of the quadrotor through the gyroscope, acceleration sensor, and geomagnetic sensor. Projection, the geomagnetic sensor measures the three-axis magnetic induction intensity at the position of the quadrotor; the body coordinate system is the reference coordinate system fixed to the quadrotor;
[0046] Step S2: Perform de-zero drift processing on the gyroscope and accelerometer respectively:
[0047] Step S3: Use a Butterwor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More