

A Nonholonomic Teleoperation Constrained Control Method Based on Complex Manipulation Tasks
A technology of complex operation and restraint control, applied in the field of space teleoperation, it can solve the problems of translation and rotation degree of freedom limitation, difficulty in ensuring operation efficiency and safety, and achieve the effect of reducing operator pressure and flexible operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention is described in further detail below in conjunction with accompanying drawing:
[0047] see Figure 1-4 , a nonholonomic teleoperation constrained control method based on complex operation tasks, characterized in that it includes the following steps:
[0048] Step 1: Calculate the constraint matrix C VF .
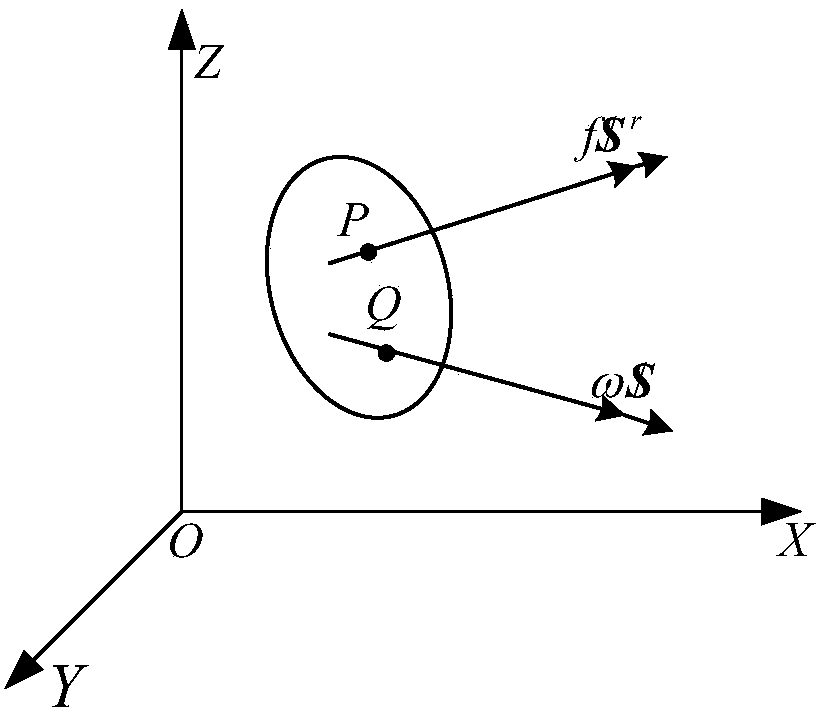
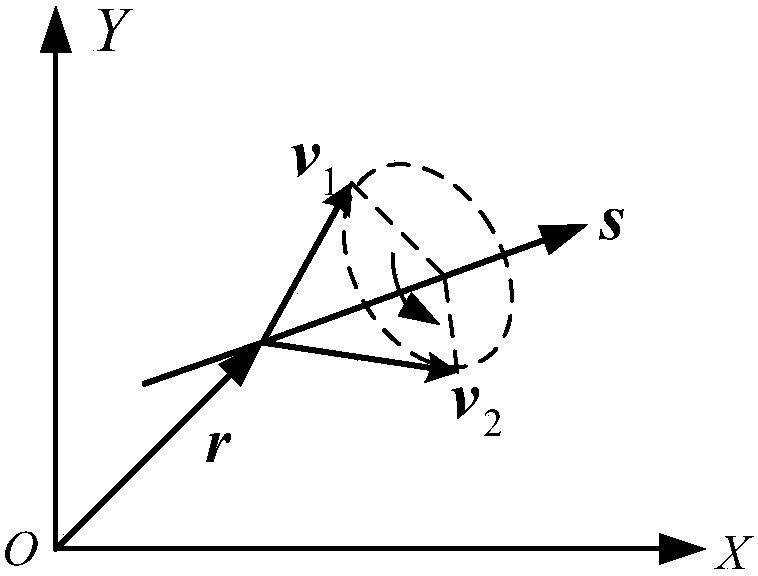
[0049] The operator controls the manipulator to complete complex tasks in the space environment, and requires effective constraints on the control force at the end of the manipulator. Such a constraint constitutes a virtual fixture, and the constraint matrix C is definedVF represents the corresponding constraint capacity, and C VF is a 6×6 positive semi-definite symmetric matrix, and maps the spatial force into C VF matrix elements. The movement of the end of the manipulator controlled by the operator toward the optimal direction and the non-optimal direction constitutes a spatial geometric constraint, and all of them can be represented by t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More