

A parallel cable-driven upper limb rehabilitation robot and its implementation method
A rehabilitation robot and cable-driven technology, applied in the field of medical rehabilitation training equipment, can solve the problems of difficult force control, complex mechanism, poor motion continuity, etc., and achieve the effect of low machining cost, simple mechanical structure, and flexible installation and use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] combined with Figure 1-9 , to further describe the present invention:
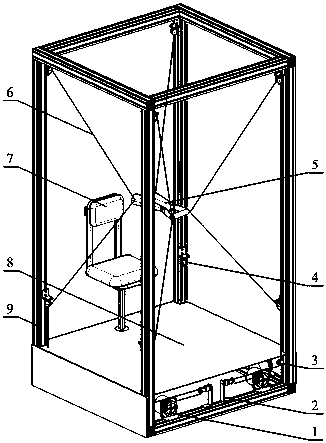
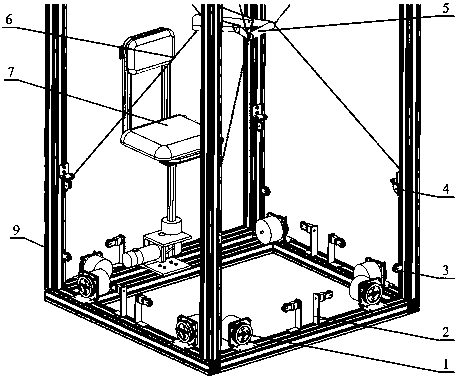
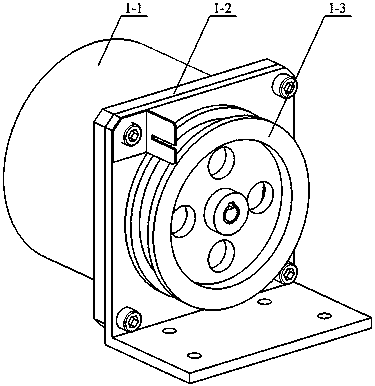
[0037] A parallel flexible cable-driven upper limb rehabilitation robot mentioned in the present invention includes a flexible cable drive module 1, a tension detection module 2, a fixed guide wheel 3, a turnover guide wheel 4, a forearm support 5, a flexible cable 6, a rotating seat 7, The base 8 and the support frame 9 constitute a cuboid truss structure composed of the support frame 9 as a whole, and the patient's rehabilitation training is also carried out inside the cuboid truss structure.
[0038] Wherein, the base 8 is arranged on the bottom of the support frame 9, covering the cable drive module 1, the tension detection module 2, the fixed guide wheel 3 and the seat drive motor at the bottom of the support frame 9, and provides a clean and tidy rehabilitation treatment platform; and rotates The seat 7 is located above the base 8 and can drive the patient's body to rotate freely according t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More