

A pipe robot that can actively stepping
A pipeline robot and active steering technology, which is applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve the problems of being unable to meet the detection requirements of complex branch pipe networks, unable to realize active steering of multi-branch pipe networks, and unable to actively steer, achieving The effect of increasing the carrying capacity, reducing the turning space and increasing the length of the whole machine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
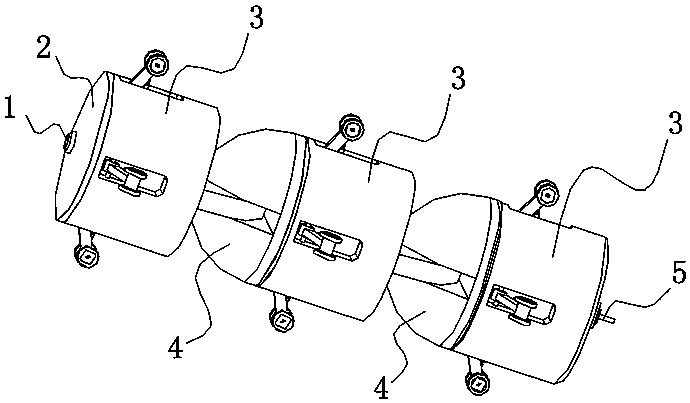
[0027] Such as figure 1 As shown, a pipeline robot that can actively steer includes a plurality of driving knuckles 3 and a plurality of steering knuckles 4, two adjacent driving knuckles 3 are connected by steering knuckles 4, and the front end of the frontmost driving knuckle 3 is provided with a front end Cover 2, a sensor 1 for detecting the distribution of the pipe network pipeline path in front of the pipeline robot is installed at the center of the front cover 2, and a universal ball joint 5 is installed at the center of the rear end of the driving joint 3 at the end. Threads are processed on the connecting rod of the hinge 5 for connecting with other pipeline detection equipment.
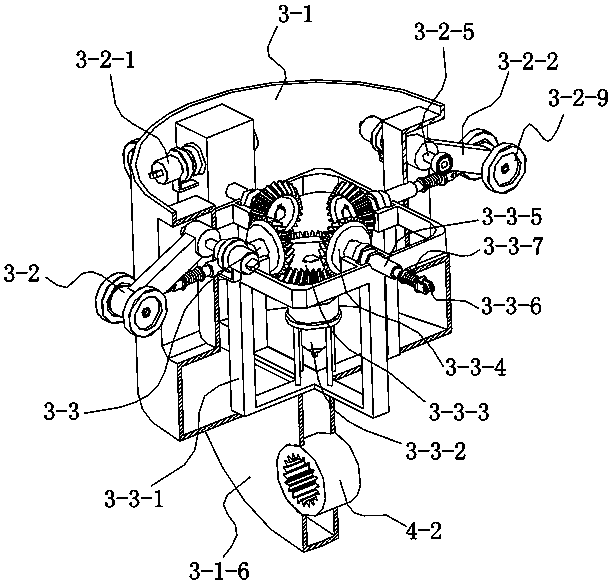
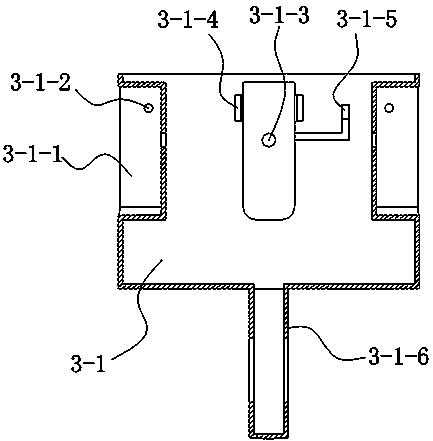
[0028] Such as figure 2 As shown, the drive joint 3 includes a main frame 3-1, a dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More