

Underactuated UUV plane trajectory tracking control method based on dynamic speed adjustment
A trajectory tracking and dynamic speed technology, applied in attitude control, non-electric variable control, vehicle position/route/altitude control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
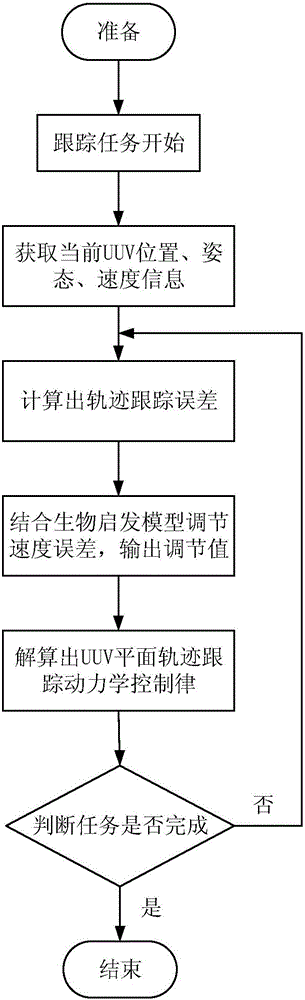
[0072] Specific Embodiments 1. An underdriven UUV planar trajectory tracking control method based on dynamic speed adjustment,
[0073] In step 1, the UUV gives the UUV the expected trajectory position information according to the current task, and collects data through the on-board navigation equipment and sensors to obtain the current position P(t)=[x(t),y(t)] T information, attitude ψ(t) information, velocity V(t)=[u r (t), v r (t),r(t)] T information.
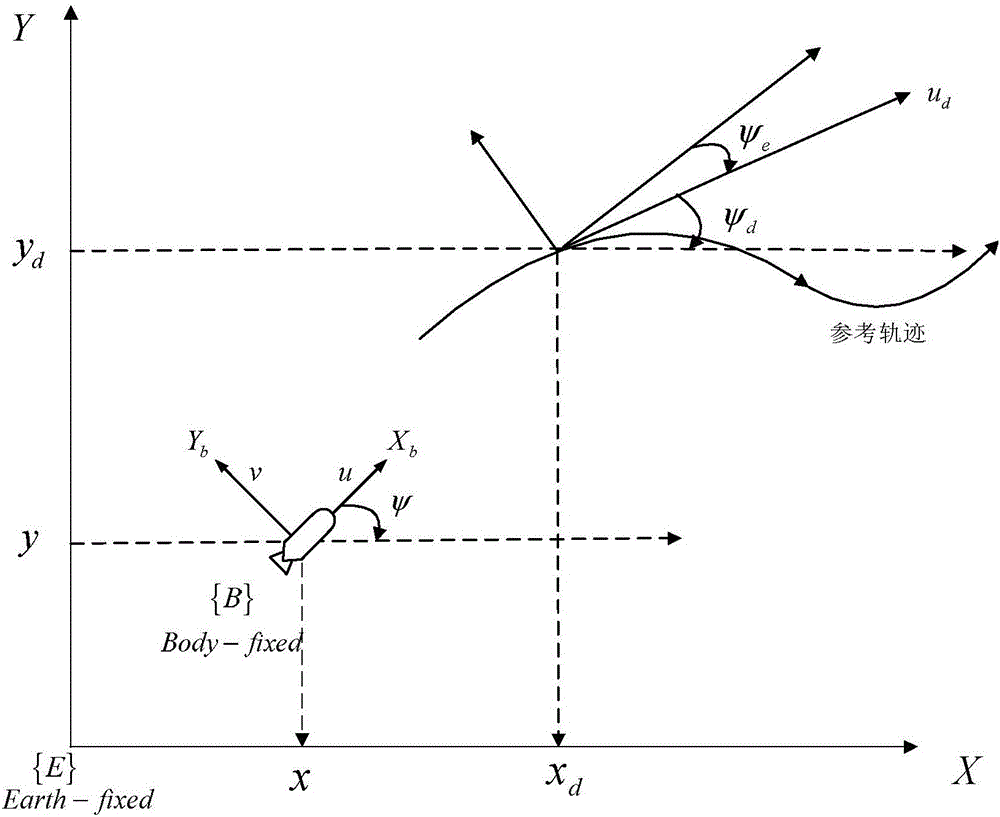
[0074] Then the UUV acquires the initial position P(t)=[x(t),y(t)] in the ground coordinate system T , UUV initial heading angle ψ(t), UUV initial longitudinal velocity u r (t), lateral velocity v r (t) and yaw rate r(t), and given the desired trajectory position P d (t)=[x d (t),y d (t)] T .
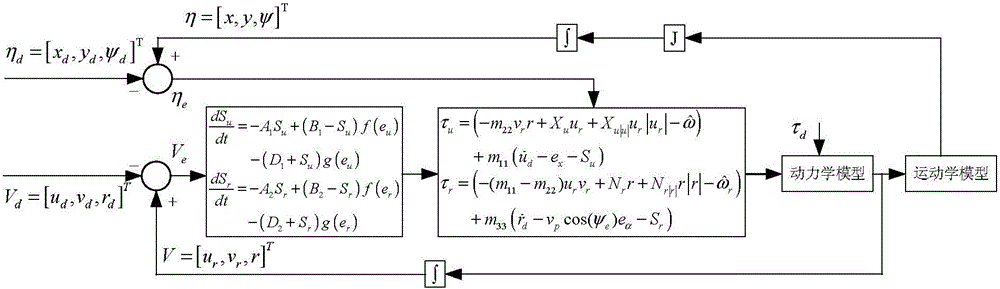
[0075] In step 2, use the information in step 1 to calculate the position error and expected attitude between the actual trajectory and the expected trajectory through the mathematical model of the underactuated UUV and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More