

Arduino based carrying robot with image recognizing function
A handling robot and image recognition technology, applied in the field of handling robots, can solve the problems of large volume, complex structure, high cost, etc., and achieve the effect of high degree of autonomy, simple structure, and low R&D and manufacturing cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention is further described below, but the present invention is not limited to the following examples.
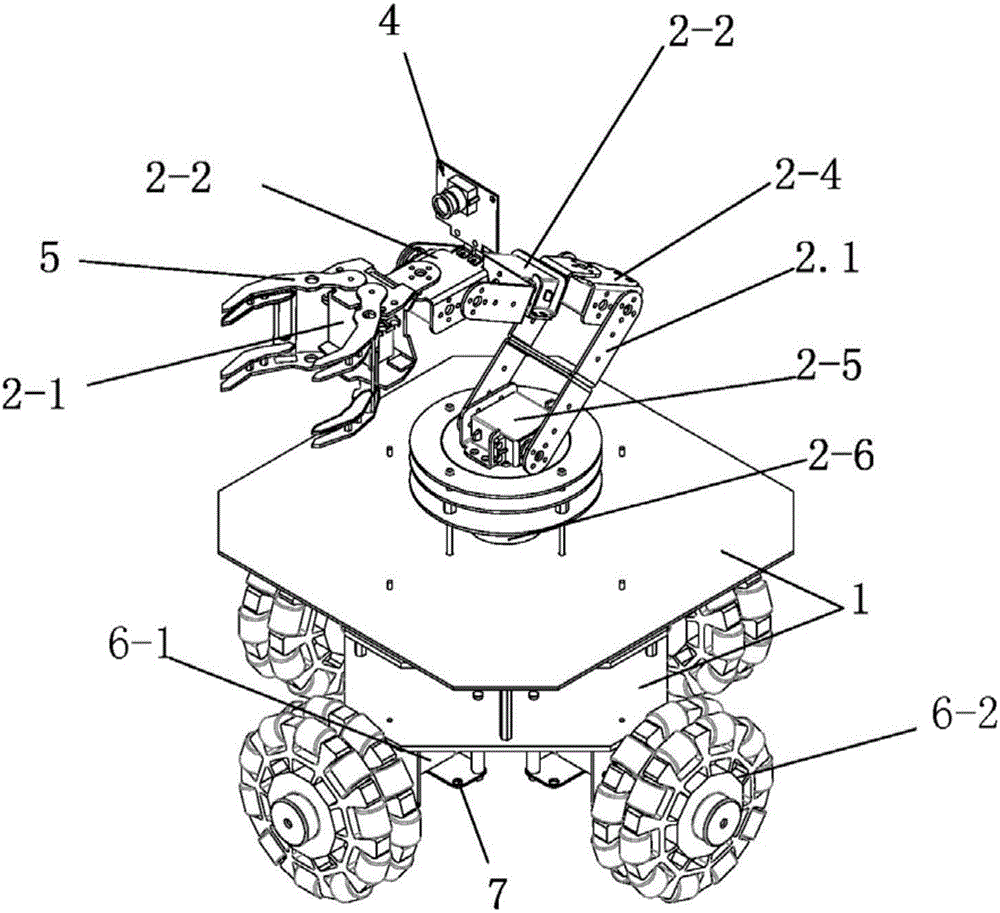
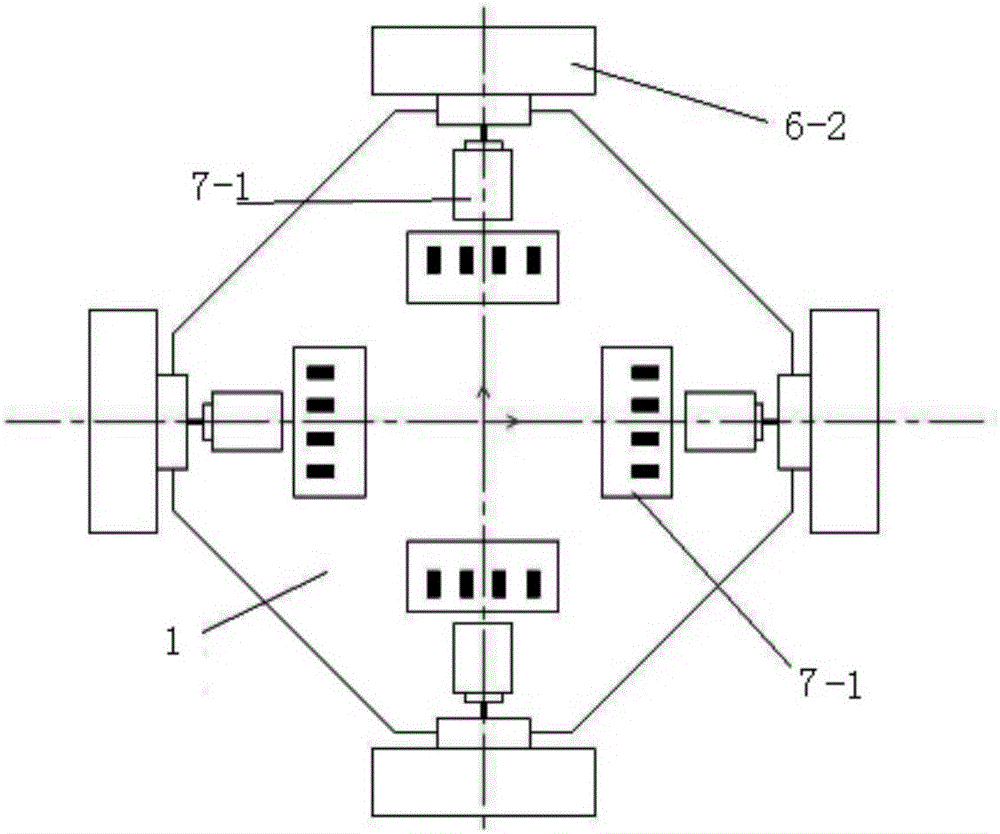
[0017] like Figure 1 to Figure 4 As shown, the Arduino-based handling robot with image recognition function of the present invention includes a frame 1, a mechanical arm 2 installed on the top of the frame, a vision sensor module 4 installed on the mechanical arm, and a bottom of the frame. The traveling device 6 and the tracking device 7 also include an Arduino control system installed on the frame, the robotic arm, the visual sensor module, the tracking device, the traveling device and the Arduino control system are electrically connected and controlled by the Arduino control.
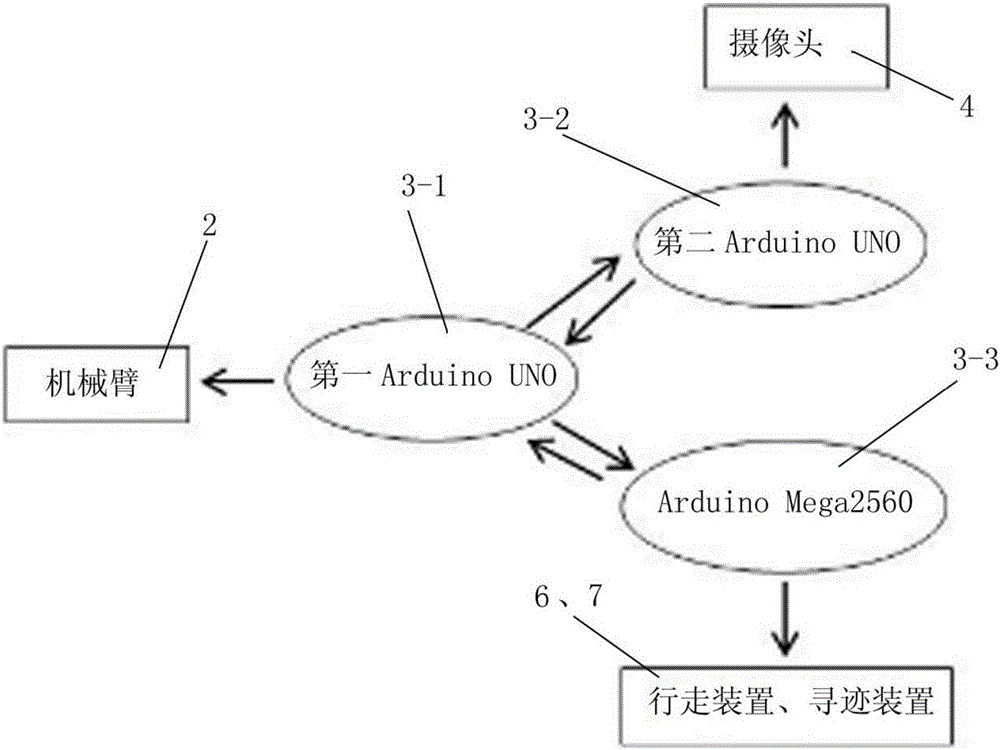
[0018] The Arduino control system includes an Arduino Mega2560 development board 3-3, a first Arduino UNO development board 3-1, a second Arduino UNO development board 3-2, and the first Arduino UNO development board communicates with the second Arduino UNO development boar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More