Interference-prevention-based multi-automatic-guided-vehicle path planning method for logistics storage system
A storage system and path planning technology, applied in logistics, forecasting, instruments, etc., can solve problems such as the expansion of interference space, the difficulty in achieving design goals in operation efficiency and safety, and the impact on operation planning and safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0142] The flow chart and preferred embodiments of the present invention are given below in conjunction with the accompanying drawings to further illustrate the technical solution of the present invention.
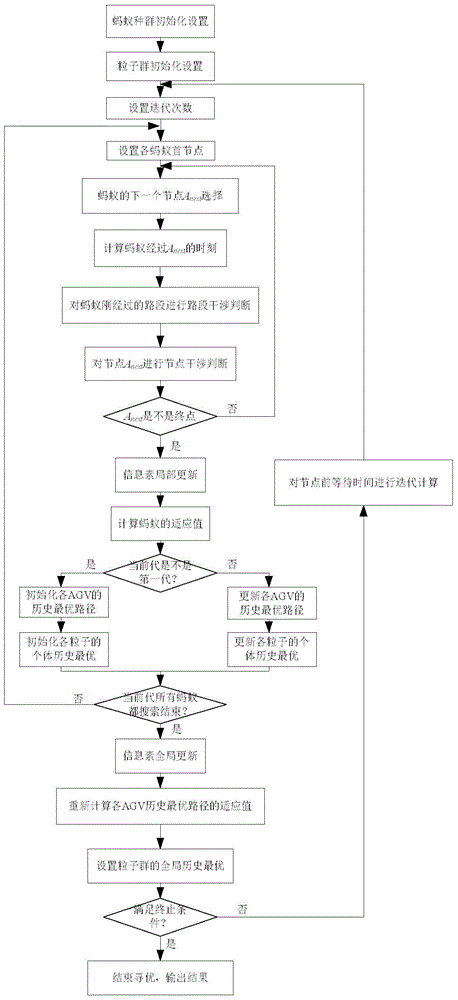
[0143] Such as figure 1 As shown, the path planning method of multiple automatic guided vehicles is implemented by the induced ant colony-particle swarm fusion algorithm, and the interference prevention of the logistics storage system is realized. The induced ant colony algorithm optimizes the path and the particle swarm optimization algorithm optimizes the waiting time before nodes. These two optimization calculations have no order. They are intertwined and include the following steps:
[0144] Step 1: Ant population initialization settings;
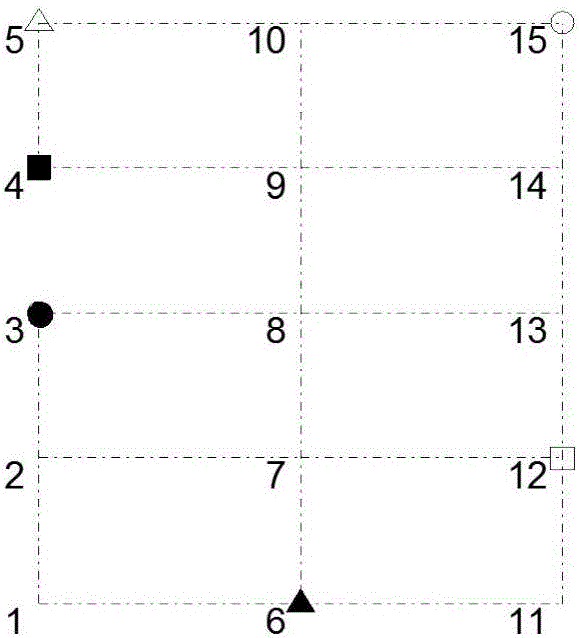
[0145] For each AGV, set M ants. For AGVs p , the first node of the initial path of each ant is S p , others are {A 1 ,A 2 ,...,A N} (remove S p ) is a sequence generated by random shuffling. Here, the pheromone setting of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More