

Rope parallel device based on translation constraint structure
A constrained structure and translational motion technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increasing manufacturing costs and system complexity, restricting the configuration of cable parallel mechanisms, increasing the number of driving cables, etc. Manufacturing cost and control complexity, avoidance of attitude errors, effects of reducing redundant control requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
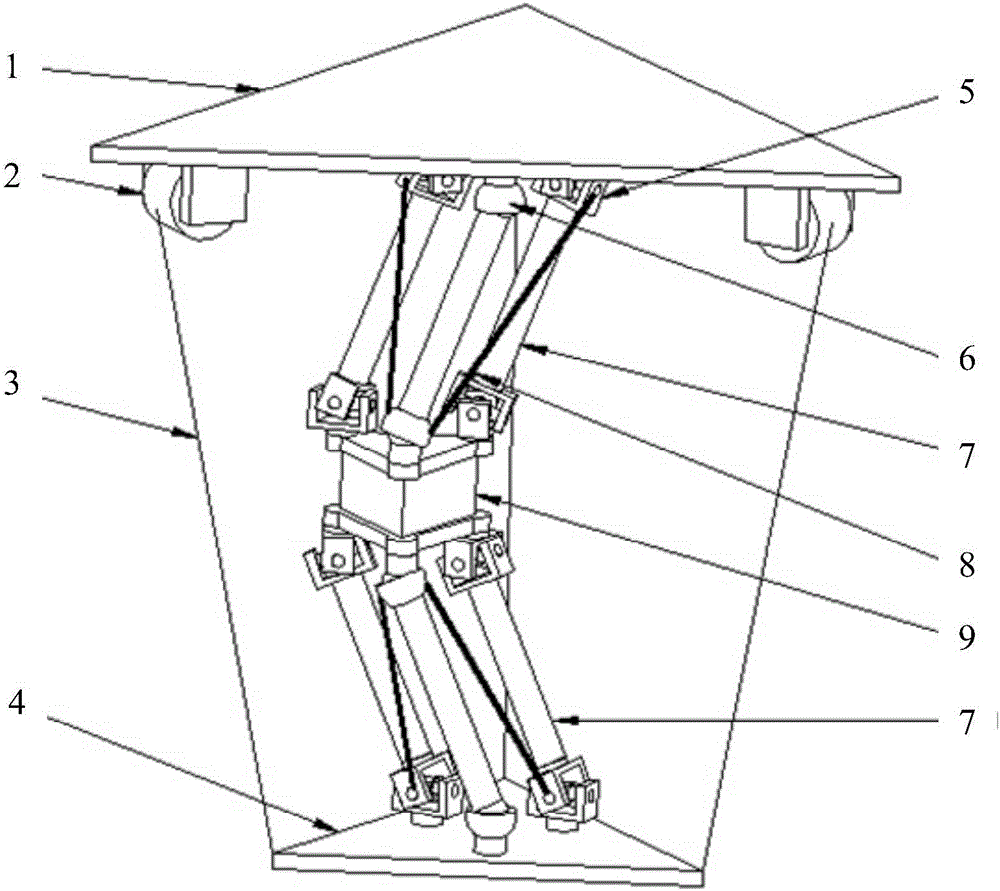
[0036] Such as figure 1 As shown, the space three-translation cable parallel mechanism based on the translation constraint structure consists of a static platform 1, a drum and a driving unit 2, a rope 3, a moving platform 4, a Hooke hinge 5, a ball hinge 6, a rigid rod 7, a spring 8, Intermediate platform 9 constitutes;
[0037] One end of the two rigid rods 7 is connected to the static platform 1 through the Hooke hinge 5, and the other end is connected to the intermediate platform 9 through the Hooke hinge 5, ensuring that the rotation axes of the four Hooke hinges 5 are parallel and the rigid rods 7 are parallel, forming a parallel structure. quadrilateral body. Outside the parallelogram plane, one end of the third rigid rod 7 is connected to the static platform 1 through the ball joint 6, and the other end is connected to the intermediate platform 9 through the ball joint 6, and the three rods 7 are parallel and equal to each other in the initial state. long. At this t...
Embodiment 2
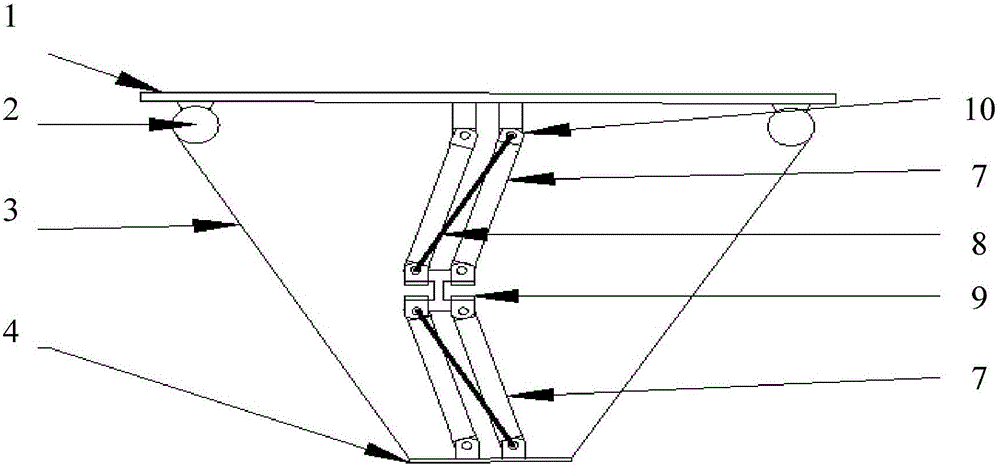
[0040] Such as figure 2 As shown, the parallel mechanism of two translational cables based on the translational restraint structure is composed of a static platform 1, a drum and a driving unit 2, a rope 3, a moving platform 4, a rotary hinge 10, a rigid rod 7, a spring 8, and an intermediate platform 9 ;
[0041] One end of the two rigid rods 7 is connected to the static platform 1 through a rotary hinge 10, and the other end is connected to the intermediate platform 9 through a rotary hinge 10 to ensure that the rotation axes of the four rotary hinges 10 are parallel to each other and the rigid rods 7 are equal in length and parallel to form a parallel structure. quadrilateral body. At this moment, it can be ensured that the intermediate platform 9 is always parallel to the static platform 1 . Similarly, the rotary hinge 10 and the rigid rod 7 are used to connect the moving platform 4 and the intermediate platform 9 to form a planar translation constraint structure to ensur...
Embodiment 3
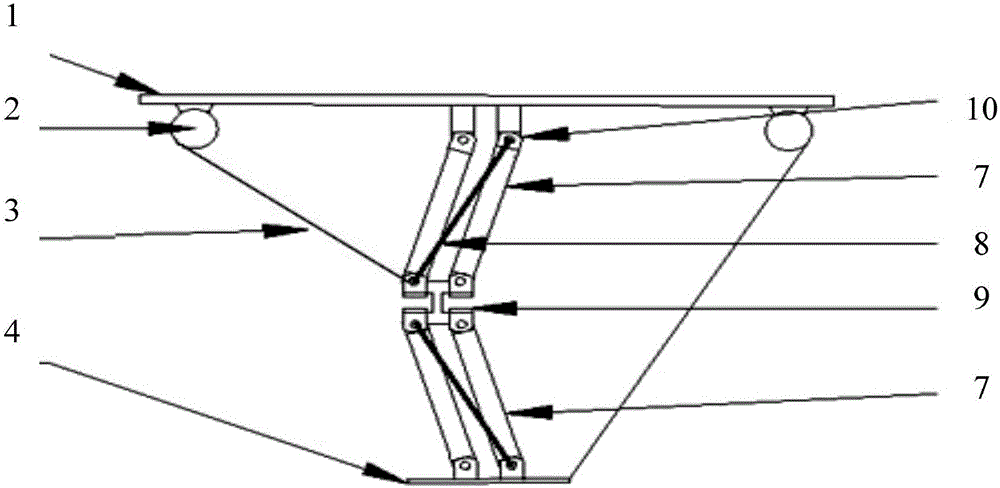
[0044] Such as image 3 As shown, the parallel mechanism of two translational cables based on the translational restraint structure is composed of a static platform 1, a drum and a driving unit 2, a rope 3, a moving platform 4, a rotary hinge 10, a rigid rod 7, a spring 8, and an intermediate platform 9 ;
[0045] One end of the two rigid rods 7 is connected to the static platform 1 through a rotary hinge 10, and the other end is connected to the intermediate platform 9 through a rotary hinge 10 to ensure that the rotation axes of the four rotary hinges 10 are parallel to each other and the rigid rods 7 are equal in length and parallel to form a parallel structure. quadrilateral body. At this moment, it can be ensured that the intermediate platform 9 is always parallel to the static platform 1 . Similarly, the rotary hinge 10 and the rigid rod 7 are used to connect the moving platform 4 and the intermediate platform 9 to form a planar translation constraint structure to ensu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More