

Caterpillar track type road surface autonomous detection robot system and detection method
A robot system and crawler technology, applied in the direction of instruments, roads, roads, etc., can solve problems such as high labor intensity, affecting traffic efficiency, low efficiency, etc., achieve economic and safety improvements, improve detection safety, and system integration good performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
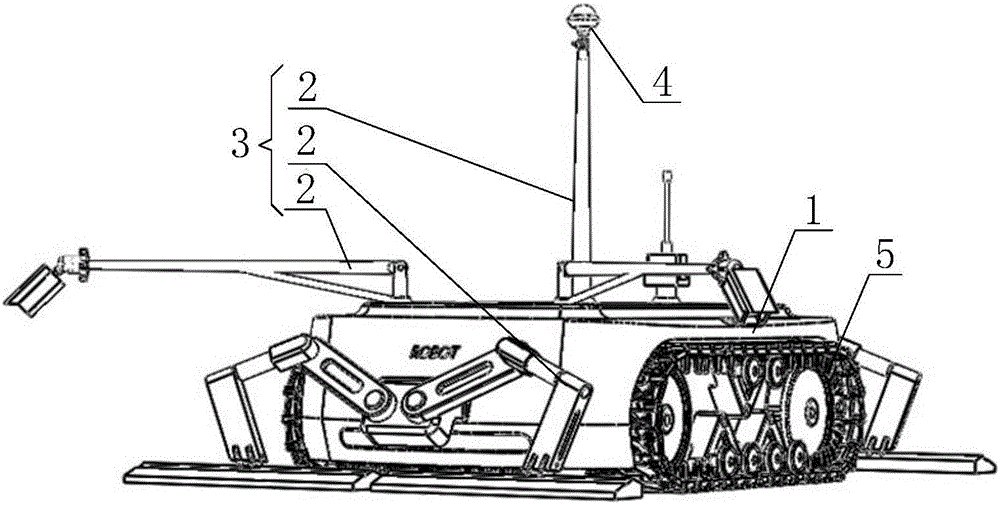
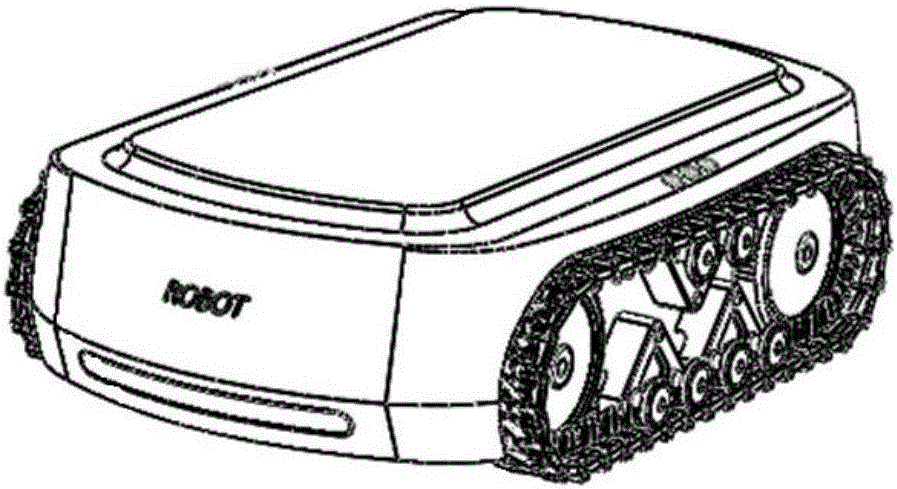
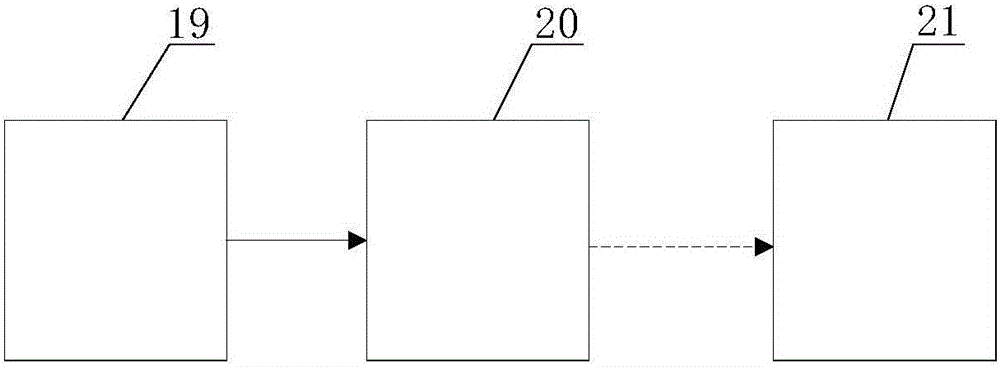
[0042] Embodiment 1 of the present invention: as figure 1 , figure 2 , image 3 and Figure 9 As shown, a crawler-type pavement autonomous detection robot system includes a crawler-type robot 1 and a remote monitoring auxiliary system 21. The crawler-type robot 1 is provided with a control system 20, a non-destructive testing system 19 and an operating mechanism 3, and the operating mechanism 3 is installed On the crawler robot 1, the nondestructive testing system 19 is connected to the operating mechanism 3, the control system 20 is electrically connected to the operating mechanism 3, and the control system 20 is electrically connected to the nondestructive testing system 19; the nondestructive testing system 19 includes a resistivity meter 9, and the operating mechanism 3 includes a telescopic mechanism 2, the resistivity meter 9 is connected to the telescopic mechanism 2; the remote monitoring auxiliary system 21 includes a control cabinet 18, an operation console 14 an...
Embodiment 2
[0046] Embodiment 2: as figure 1 , figure 2 , image 3 and Figure 9 As shown, a crawler-type pavement autonomous detection robot system includes a crawler-type robot 1 and a remote monitoring auxiliary system 21. The crawler-type robot 1 is provided with a control system 20, a non-destructive testing system 19 and an operating mechanism 3, and the operating mechanism 3 is installed On the crawler robot 1, the nondestructive testing system 19 is connected to the operating mechanism 3, the control system 20 is electrically connected to the operating mechanism 3, and the control system 20 is electrically connected to the nondestructive testing system 19; the nondestructive testing system 19 includes a resistivity meter 9, and the operating mechanism 3 includes a telescopic mechanism 2, the resistivity meter 9 is connected to the telescopic mechanism 2; the remote monitoring auxiliary system 21 includes a control cabinet 18, an operation console 14 and a monitoring screen 15,...
Embodiment 3
[0048] Embodiment 3: as figure 1 , figure 2 , image 3 and Figure 9 As shown, a crawler-type pavement autonomous detection robot system includes a crawler-type robot 1 and a remote monitoring auxiliary system 21. The crawler-type robot 1 is provided with a control system 20, a non-destructive testing system 19 and an operating mechanism 3, and the operating mechanism 3 is installed On the crawler robot 1, the nondestructive testing system 19 is connected to the operating mechanism 3, the control system 20 is electrically connected to the operating mechanism 3, and the control system 20 is electrically connected to the nondestructive testing system 19; the nondestructive testing system 19 includes a resistivity meter 9, and the operating mechanism 3 includes a telescopic mechanism 2, the resistivity meter 9 is connected to the telescopic mechanism 2; the remote monitoring auxiliary system 21 includes a control cabinet 18, an operation console 14 and a monitoring screen 15,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More