

Fuzzy PID algorithm based ship course controller
A controller and ship technology, applied in two-dimensional position/channel control, non-electric variable control, control/regulation system, etc., can solve problems such as difficulty in guaranteeing control effect, affecting system stability, and difficulty in parameter adjustment. Achieve good adaptability, system stability, and output error reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
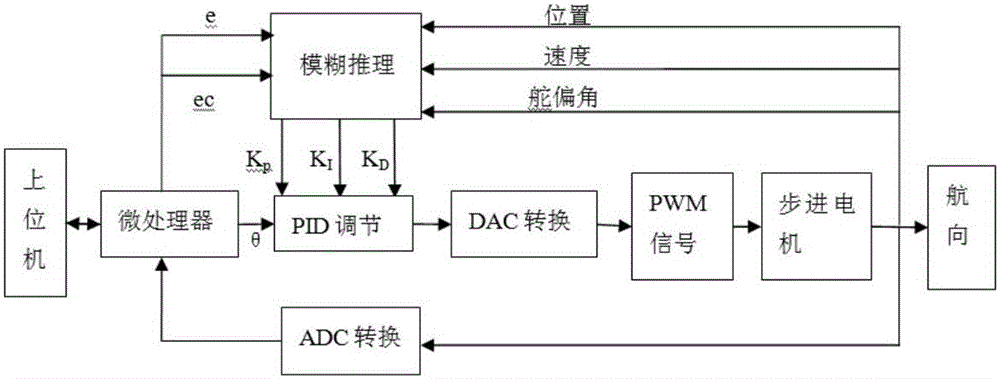
[0039] Such as figure 1 As shown, the main input unit of the ship heading controller is used to obtain the ideal rudder angle deflection and output according to the rudder angle required by the ship and the output of the stepper motor drive unit;
[0040] The analog-to-digital conversion unit is used to perform digital-to-analog conversion on the output of the PID adjustment unit and send it to the PWM signal output unit, and is also used to perform digital-to-analog conversion on the output of the stepping motor drive unit and send it to the input unit;
[0041] The fuzzy parameter correction unit is used for performing f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More