Gear five-rod jumping ankle joint based on hydraulic driving
A technology of hydraulic gears and ankle joints, applied in the field of bionic robots, can solve the problems of restricting the robot's high and long jumping ability, insufficient power, and insignificant acceleration effect, and achieve the effect of realizing non-linear changes in joint angles, compact structure, and high driving power.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] This embodiment is a geared five-bar jumping ankle joint based on hydraulic drive.
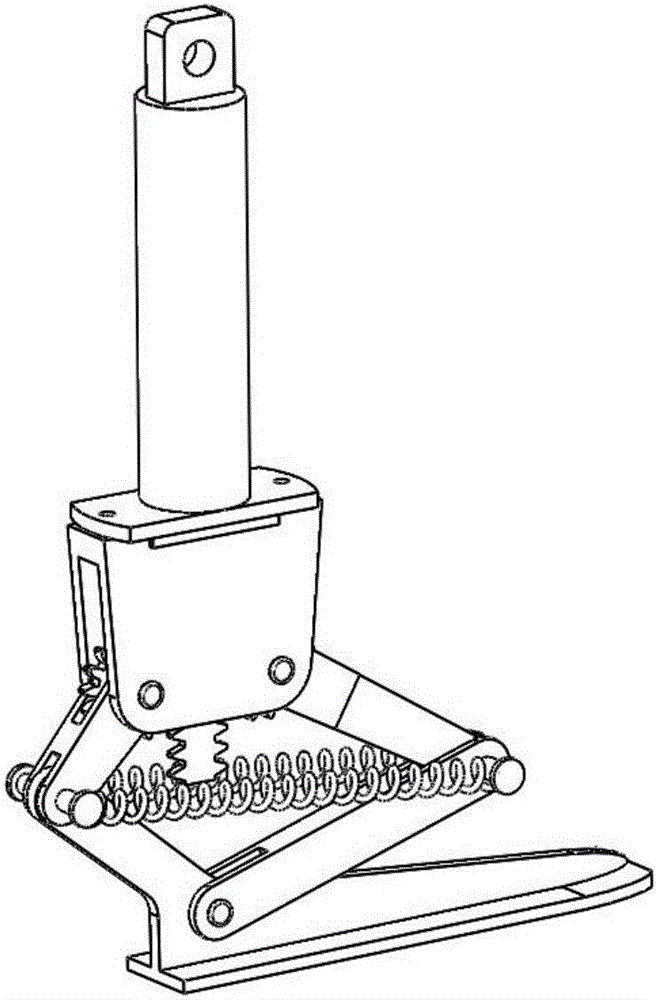
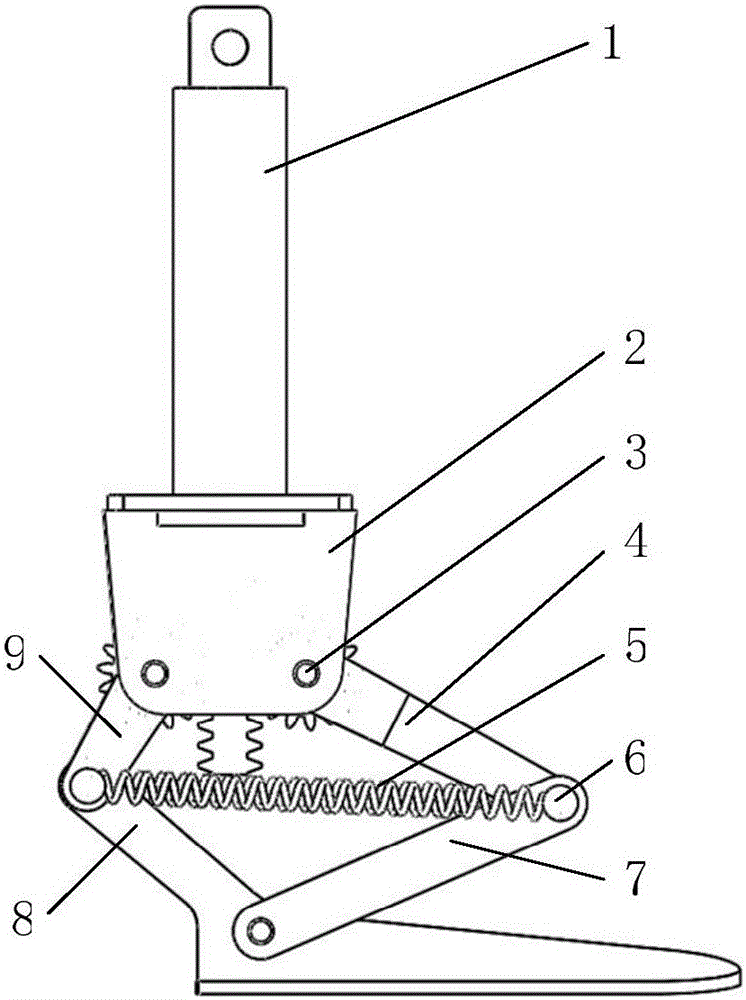
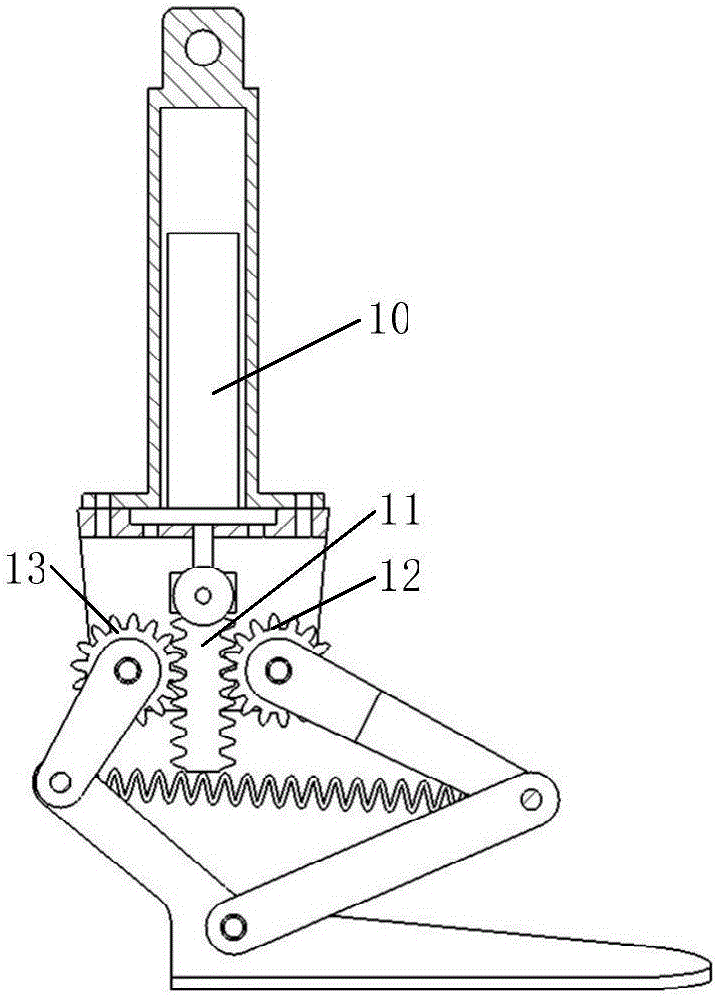
[0022] refer to Figure 1 to Figure 6 , the present embodiment is based on a hydraulically driven gear five-bar jumping ankle joint, which is composed of a hydraulic gear transmission and a linkage mechanism. The hydraulic gear transmission device includes a calf chamber 1, a connecting frame 2, a hydraulic cylinder 10, a double-sided rack 11, a first transmission gear 12, and a second transmission gear 13. The lower end of the calf chamber 1 is fixedly connected to the connecting frame 2, and the hydraulic cylinder 10 is installed on In the calf cavity 1, the output shaft of the hydraulic cylinder 10 is connected with the upper end of the bilateral rack 11 through a pin shaft, and the lower end of the connecting frame 2 has symmetrical positioning holes for installing the first transmission gear 12 and the second transmission gear 13, The distance between the two positioning holes on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com