

Six-wheel-leg movable operation robot test platform
A technology of mobile operation and experimental platform, which is applied in the fields of electronic technology, sensing and robotics, can solve the problems of low work efficiency, demanding working environment, difficult control, etc., and achieve the effect of convenient control and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in further detail below in conjunction with the accompanying drawings.
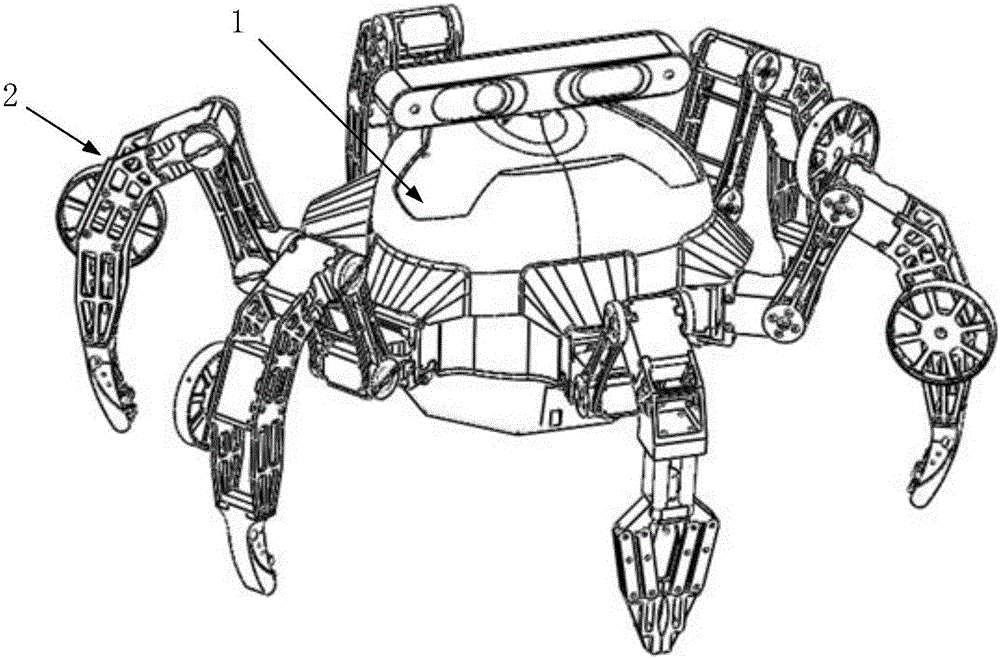
[0032] The six-wheel leg mobile operation robot experimental platform of the present invention includes a robot body 1 and 6 robot single-leg structures 2, such as figure 1 As shown, six robot single-leg structures 2 are evenly installed on the robot body 1 in the circumferential direction.
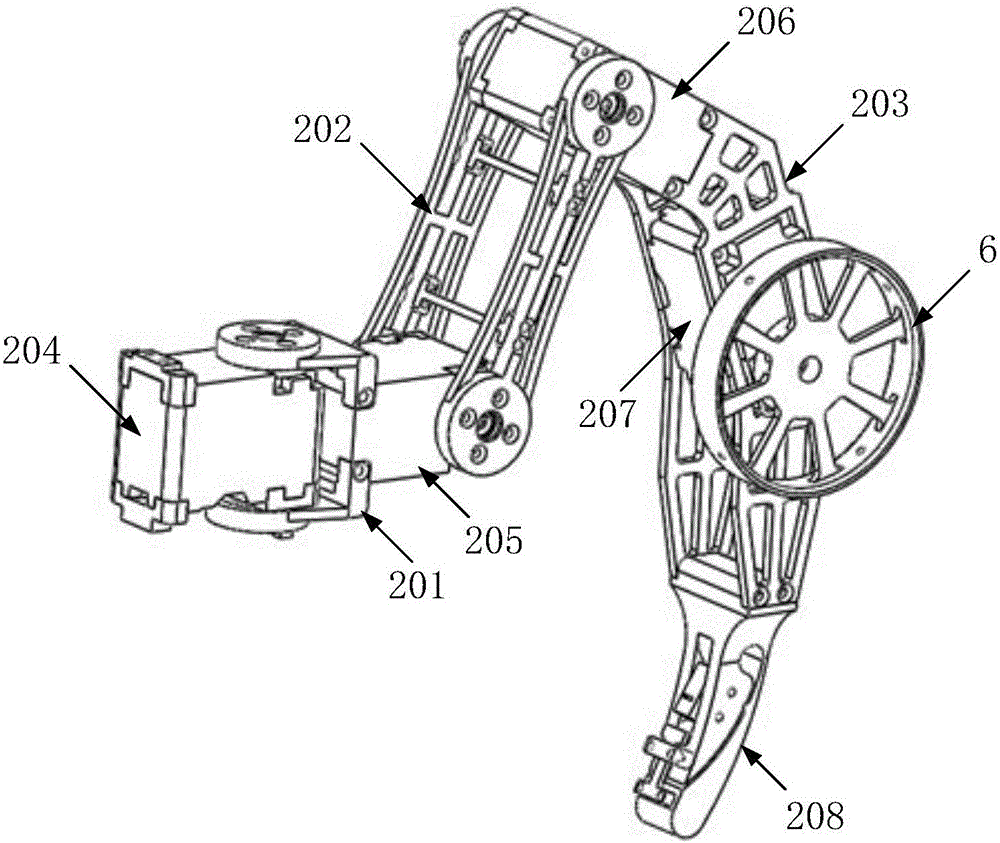
[0033] Generally, in order to realize the free movement of the foot end in space when the robot walks, the single-leg structure 2 degrees of freedom must be at least 3, and the more the 2 degrees of freedom of the single-leg structure of the robot, the more flexible the legs are, but the design, control difficulty and quality of the legs will gradually increase. In the present invention, the six robot single-leg structures 2 all adopt three steering gears to output three degrees of freedom to realize the basic walking function.
[0034] Single-leg structure 2 is design...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More