

Rotor unmanned aerial vehicle coverage search flight path planning method for polygonal region having no-fly zone
A technology of unmanned rotor and track planning, applied in navigation calculation tools and other directions, to achieve the effect of reducing the number of decomposition search units
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
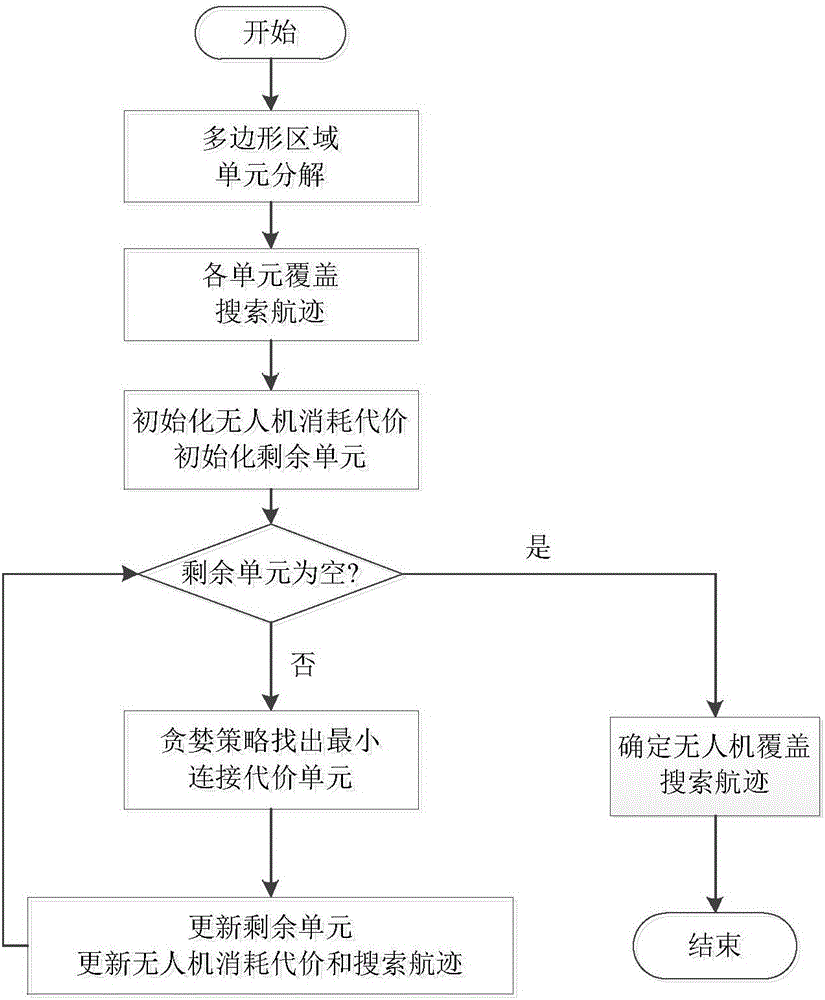
Method used
Image

Examples
Embodiment 1
[0049] Assume that the vertex coordinates of the polygonal area are shown in Table 1; there are 3 polygonal no-fly zones and 1 circular no-fly zone in the polygonal area, and the parameters of the no-fly zone are shown in Table 2; the constraint parameters of the rotor UAV are shown in Table 3 Show.
[0050] Table 1 Vertex coordinates of polygonal area
[0051] area apex
coordinates
Vertex 1
(25000,18000)
Vertex 2
(19000,9000)
Vertex 3
(10000,10000)
Vertex 4
(6000,14000)
Vertex 5
(-5000,20000)
Vertex 6
(15000,31000)
[0052] Table 2 Vertex coordinates of polygonal area
[0053]
[0054]
[0055] Table 3 UAV constraint parameters
[0056] Drone Constraint Parameters
value
search width
500
Maximum range
100×10 3
[0057] The specific implementation steps are as follows:
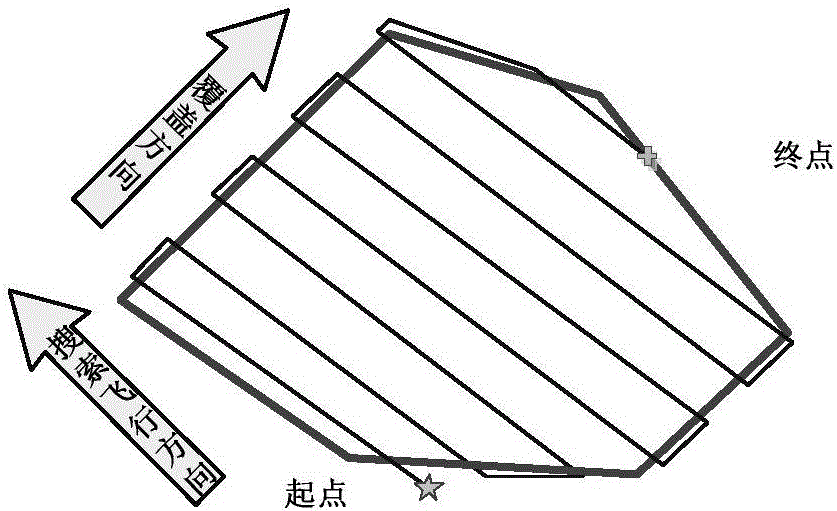
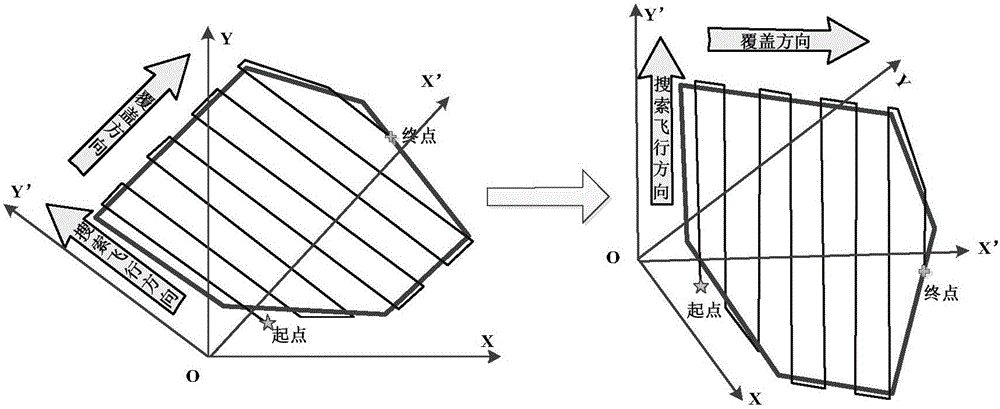
[0058] Step 1, determine the coverage direction. First, calculate the distan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More