

Leg mechanism for serial-parallel hybrid human-simulated soccer robot
A football robot and leg mechanism technology, which is applied in the field of robotics, can solve problems such as insufficient rigidity and excessive inertia of the leg mechanism, and achieve the effects of reducing moment of inertia, lightening load, and enhancing leg stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
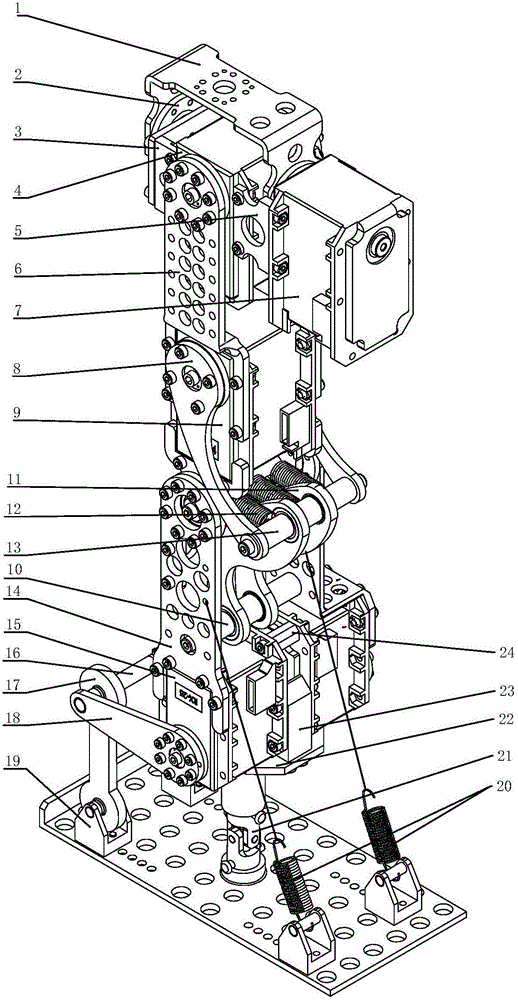
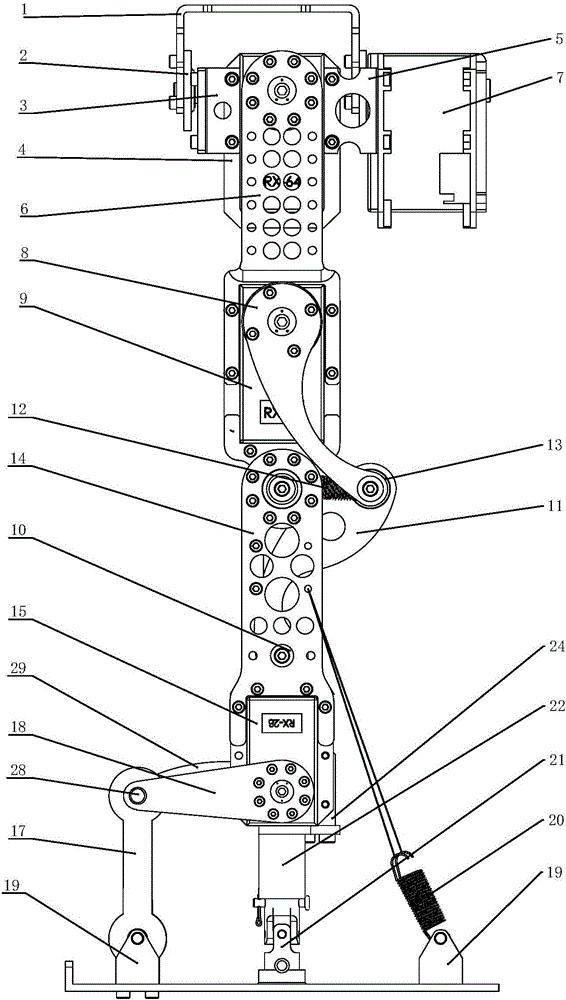
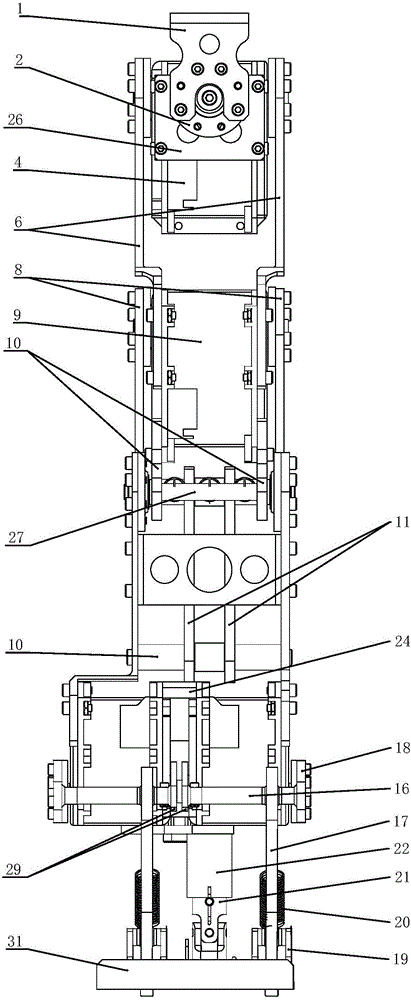
[0023] like Figure 1~5 As shown, the humanoid soccer robot leg mechanism of the present invention's series-parallel hybrid includes successively hinged hip joints, thigh links 6, knee joints, calf links 14, ankle joints and foot plates 31,
[0024]The hip joint includes: U-shaped frame 1, rotating flange 2, first hip joint reinforcing plate 3, hip joint pitch driving unit 4, second hip joint reinforcing plate 5, hip joint rolling driving unit 7, flange mounting plate 26. The U-shaped frame 1 is connected to the drive unit that drives the degree of freedom in the yaw direction of the leg mechanism on the fuselage; the output shaft of the hip joint pitch drive unit 4 is hinged to the upper part of the thigh link 6, and the first A hip joint reinforcing plate 3 and the second hip joint reinforcing plate 5 are fixedly connected to the left and right sides of the hip joint pitch drive unit 4, and the base of the rotating flange 2 is fixedly installed on one side of the U-shaped fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More