

Aircraft positioning method based on positioning and sensing device
A technology of positioning sensing and positioning method, which is applied in the field of aircraft positioning and can solve problems such as large size and inapplicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
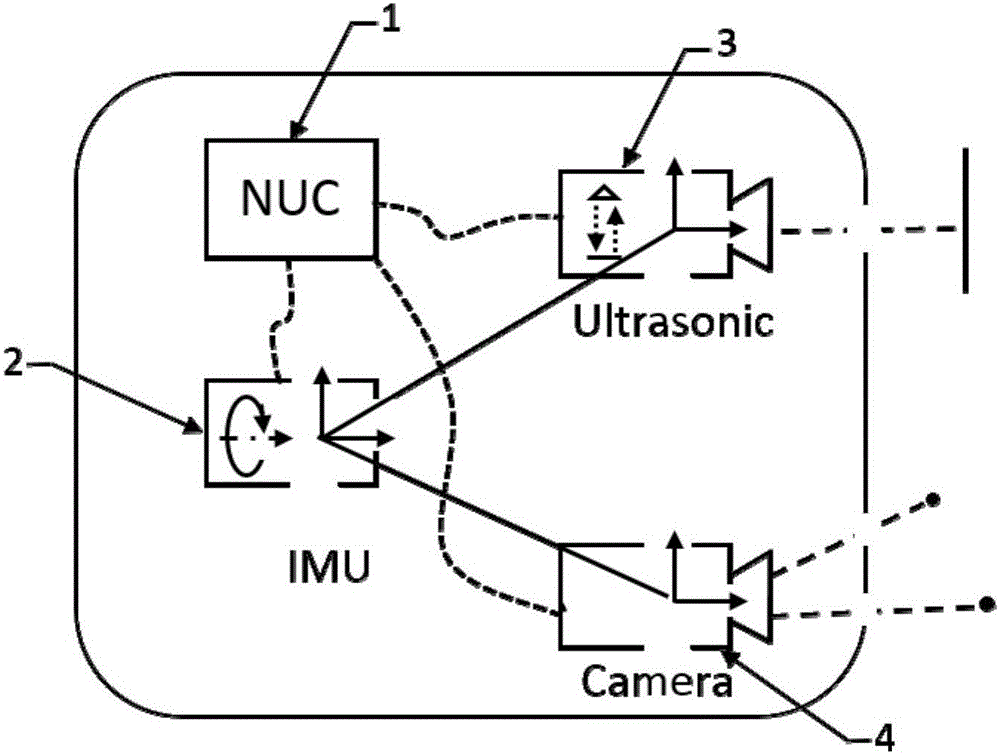
[0105] like figure 1 Shown is the positioning sensing device of the aircraft, which is composed of a microprocessor (NUC) 1 , an inertial sensing unit (IMU) 2 , an ultrasonic sensor 3 and a camera 4 .
[0106] The microprocessor adopts the NUC (NUC5i7RYH) series of Intel Corporation, and the whole weight is only 0.607Kg. This series of processors has the characteristics of small size, multiple interfaces, fast processing speed, powerful functions, low power consumption, and fast heat dissipation. The image information collected by the high frame rate is huge, which has high requirements on the real-time ability of data processing; and all data processing requirements are carried out under the linux (ubuntu) system; the whole set of devices is required to be installed on the micro air vehicle, so Based on the above requirements, it is very suitable to choose NUC5i7RYH because of its large-capacity data processing capability, thin and light appearance, and cross-platform feature...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More