Control Method of Discrete Second-Order Sliding Mode Control System Based on Data Driven ACC System
A second-order sliding mode, data-driven technology, applied in general control systems, adaptive control, control/regulation systems, etc., to achieve the effect of improving anti-interference ability, alleviating uncertainty, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings.
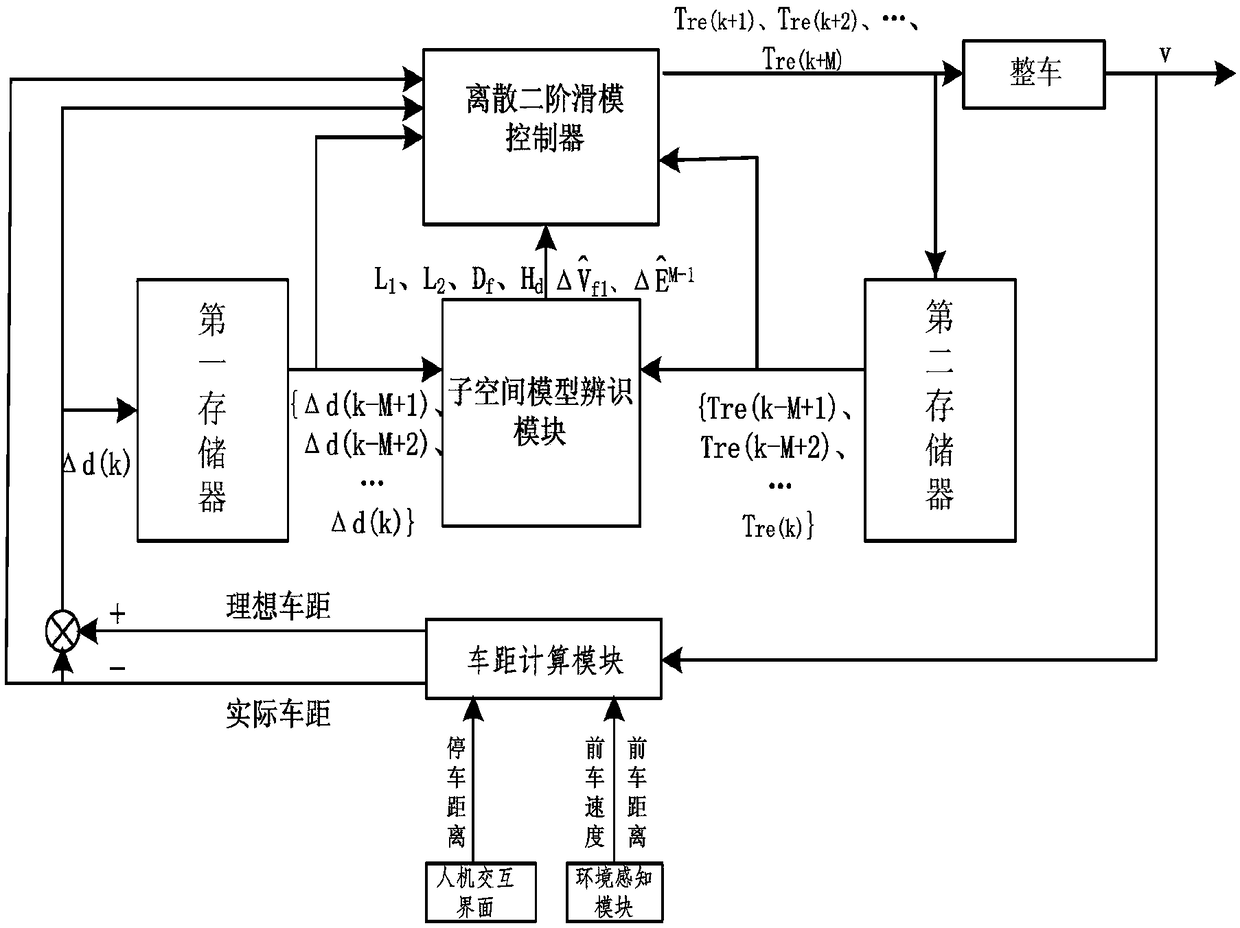
[0023]As shown in the figure, the data-driven ACC system discrete second-order sliding mode control system of the present invention includes a vehicle distance calculation module, a subspace model identification module, a discrete second-order sliding mode controller, a human-computer interaction interface and an environment perception module; The input of the distance calculation module is the preset parking distance provided by the human-computer interaction interface, the speed and distance of the vehicle ahead detected by the environmental perception module, and the actual speed of the vehicle measured by the whole vehicle. Calculate the actual vehicle distance and the ideal expected vehicle distance between the current moment and the vehicle in front, and obtain the vehicle distance error at the current moment by making a difference between the actual veh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com