A Method for Controlling Large-Scale Combination Transposition
A control method and combination technology, applied in attitude control, space navigation equipment, space navigation equipment, etc., can solve problems such as saturation of angular momentum actuators, failure to restore attitude, joint damage of transposition control mechanisms, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
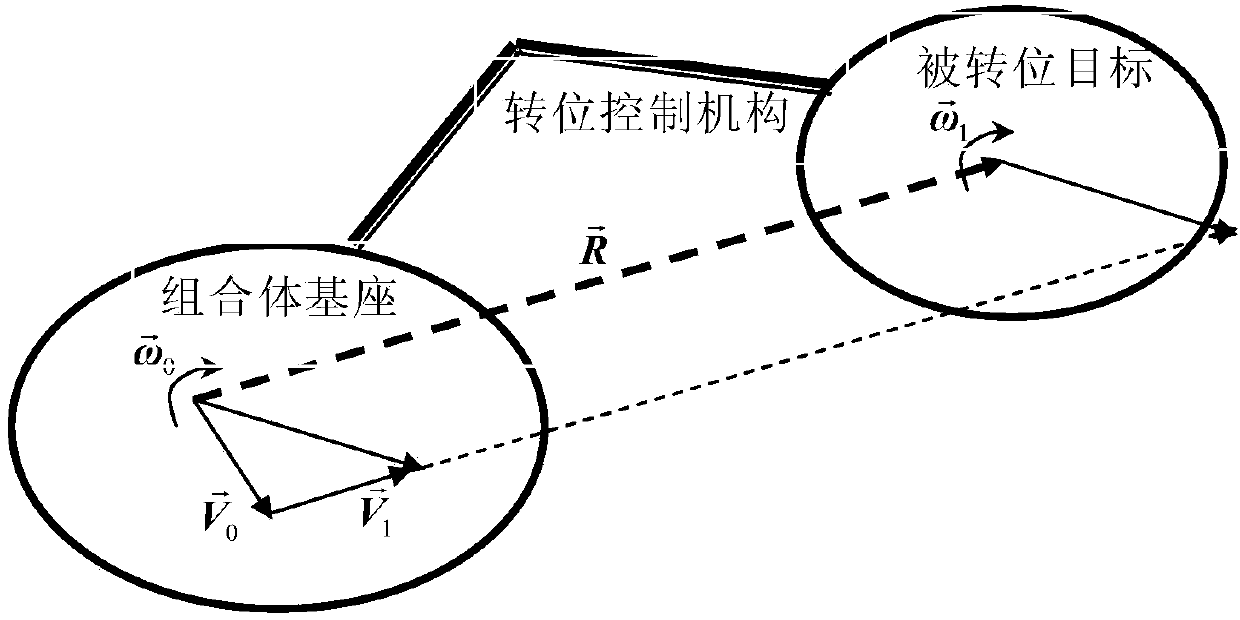
[0054] (1) Set the assembly base, that is, the part launched into orbit first, numbered 0, and the target body, that is, the part launched into orbit later for rendezvous and docking, numbered 1; the large assembly base and the target body are combined to form Assembly; define the orbital coordinate system XYZ, the origin is located at the center of mass of the assembly, the Z axis points to the center of the earth, the X axis points to the flight direction of the large assembly, and the Y axis forms a rectangular coordinate system with the X and Z axes; on the base and the target body , establish the fixed body coordinate system respectively; define the body coordinate system X of the assembly base 0 Y 0 Z 0 , the origin is at the centroid of the base of the assembly, X 0 Axis, Y 0 Axis, Z 0 The axes are parallel to the X-axis, Y-axis, and Z-axis respectively; define the body coordinate system X of the target body 1 Y 1 Z 1 , the origin is located at the center of mass...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More