

Four-wheel independent driving control system of electric wheelchair
A four-wheel independent drive, electric wheelchair technology, used in vehicle rescue, patient chairs or special transportation tools, medical transportation, etc. To achieve the effect of starting acceleration and braking quickly and effectively, strong driving ability, and reducing roll
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below, the substantive features and advantages of the present invention will be further described in conjunction with examples, but the present invention is not limited to the listed examples.
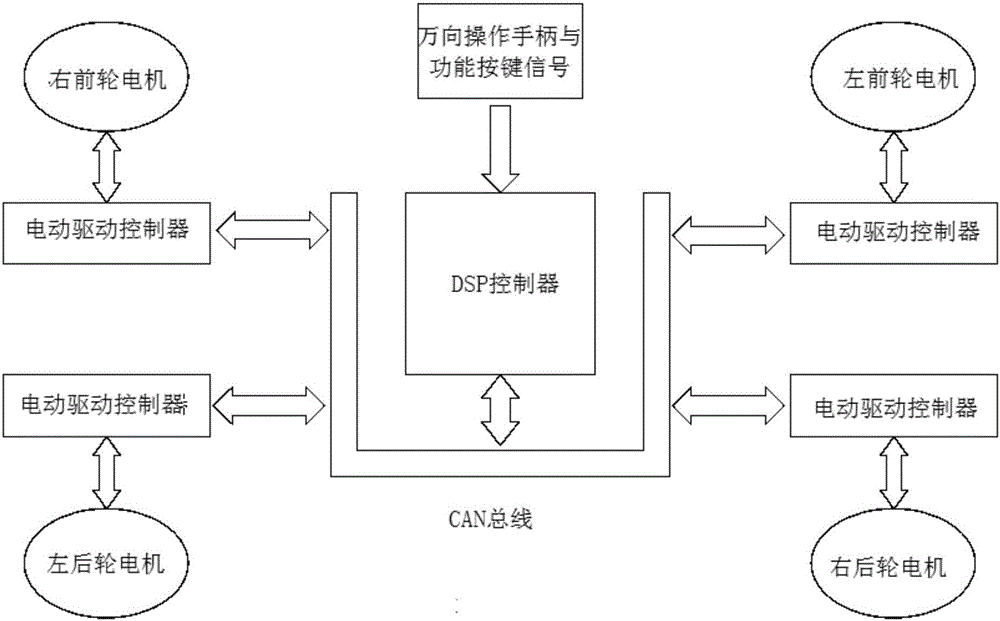
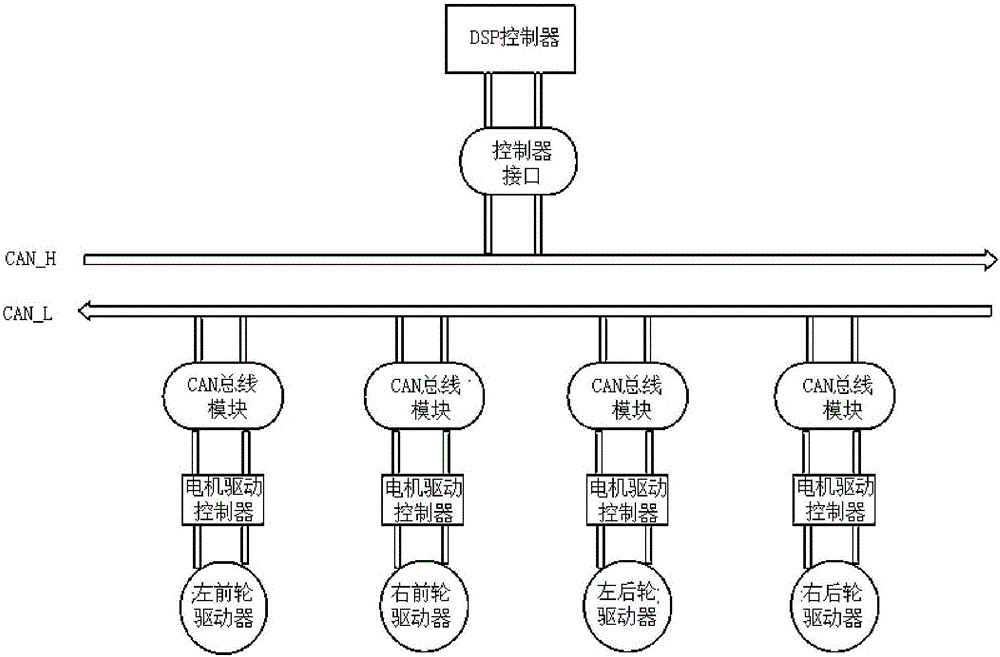
[0020] see figure 1 , 4 As shown, a four-wheel independent drive control system of an electric wheelchair includes:
[0021] Universal joystick 1 for controlling the running speed of the wheelchair, function buttons, DSP controller, four left rear wheel motors, right rear wheel motors, left front wheel motors, and right front wheel motors for controlling electric wheelchairs respectively Four electric drive controllers; the electric drive controller is connected with the DSP controller through the CAN bus, the DSP controller is connected with the universal joystick through the A / D conversion circuit and connected with the function button circuit The function keys are electrically connected; the function keys are arranged on the operation panel, including a power switch 5 for s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More